
Fターム[2F034EA05]の内容
運動の有無又は方向の指示又は記録 (1,376) | 運動方向の正逆、左右の検出 (197) | 移動量や移動速度も検出しているもの (12)
Fターム[2F034EA05]に分類される特許
1 - 12 / 12
エンコーダホイール、ロータリエンコーダ、及び回転方向検出方法
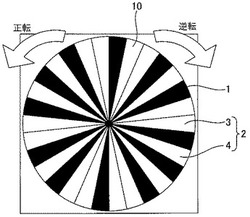
【課題】本発明は、磁気式であっても、速度検出の精度を保ったまま、1つのセンサで回転方向を検出することのできるエンコーダホイール、ロータリエンコーダ、及び回転方向検出方法を提供する。
【解決手段】回転体の回転を検出するための磁気センサを備えて前記回転体の回転に対応したパルスを出力するロータリエンコーダのエンコーダホイール10において、前記磁気センサが対向したときに、高い電圧の前記パルスが出力されるアクティブ部1と、前記パルスが出力されないインアクティブ部2とが円周方向にそれぞれ複数配列された磁気パターンを有し、前記アクティブ部1の各々は、前記円周方向に略同幅に形成され、前記インアクティブ部2は、前記円周方向に幅の異なる第1インアクティブ部3、及び第2の幅で形成された第2インアクティブ部4を含み、回転方向により、前記アクティブ部1が前記磁気センサと対向するタイミングが異なるようにした。
(もっと読む)
車両用回転検出装置

【課題】被回転検出体の回転開始時においても迅速にその被回転検出体の回転方向を検出することができる車両用回転検出装置を提供する。
【解決手段】被回転検出体70において連続する複数の回転角間隔Lnに対応する予め設定された複数種類の回転角間隔データ列LDTAのうち、複数のパルスインターバルTnの各々を回転角間隔Lnに基づいてロータ回転速度Nに換算した回転速度換算値NXの時間変化が線形に最も近い回転角間隔データ列LDTAに基づいて、被回転検出体70の回転方向を検出する回転方向検出制御が実行される。従って、微少時間に限れば略線形に時間変化する実際のロータ回転速度Nに最も近い回転速度換算値NXを与える回転角間隔データ列LDTAが選択され、それに基づいて被回転検出体70の回転方向が検出されるので、被回転検出体70の回転開始時においても、迅速且つ正確に被回転検出体70の回転方向を検出することができる。
(もっと読む)
回転方向検出機能付き回転数センサ
【課題】本発明は、回転数を検出することができるとともに、回転方向も検出することができる回転方向検出機能付き回転数センサを提供することを目的とするものである。
【解決手段】本発明の回転方向検出機能付き回転数センサは、第1の比較器31から得られる出力パルス信号の立ち上がりエッジ時点での第2の比較器39から出力される出力パルスレベルと、第1の比較器31から得られる出力パルス信号の立ち下がりエッジ時点での第2の比較器39から出力される出力パルスレベルとを比較する回転方向検出用比較器42を設ける構成としたものである。
(もっと読む)
検知デバイス、およびエレベータ又はエスカレータの制御装置
本発明は、エレベータ及びエスカレータのセルフテスト機能を有する速度及び移動方向検知デバイスを開示する。検知デバイスは、120度の(電気)角度だけシフトした3つのパルスを生成するインクリメンタルエンコーダを含む。速度信号生成部は、エンコーダ信号を受信し、その周波数が入力信号の周波数に比例するパルス信号を生成する。エンコーダセルフテスト部は、エンコーダ状態をモニタし、エンコーダ信号に基づいてエンコーダエラーを検出し、方向検出部は、エンコーダパルスに基づいて方向信号を生成する。速度が0の場合であっても、この検知デバイスによって、セルフテストを実施することができる。耐故障性の速度及び移動方向検知デバイスは、従来技術よりも高い信頼性を提供し、高い安全性及び保全性レベルが要求される運動制御システムに適用することができる。  (もっと読む)
(もっと読む)
回転数センサ
【課題】本発明は、回転数を検出することができるとともに、回転方向も検出することができる回転数センサを提供することを目的とするものである。
【解決手段】本発明の回転数センサは、差動増幅回路29からの出力信号を所定の電圧と比較して矩形波信号を出力するコンパレータ30の後段に、このコンパレータ30からの出力信号の立ち上がりおよび立ち下がりを検出して比較する立ち上がり検出手段32、立ち下がり検出手段34およびコンパレータ36等からなる比較手段を設けたものである。
(もっと読む)
ターボ分子ポンプ
【課題】簡単な構成により、始動時におけるロータの逆回転を容易に検出することができるターボ分子ポンプ。
【解決手段】回転数を検出するための凹凸段差が形成されたセンサターゲット46と、センサターゲット46のターゲット面と対向するように設けられインダクタンス式の回転センサ47とを備え、凸部46aを大きさの異なる2つの凸領域(角度α1の領域と角度α2の領域)に分割する位置に設けられ、センサ信号に逆転検出信号を生成させるサブターゲットとしてのスリット460を形成する。回転センサ47の出力信号には、スリット460に対応するスリット検出信号と、凸部46aと凹部46bとの段差に対応する段差検出信号とが生じる。逆転検出信号を構成するスリット検出信号と段差検出信号とを利用することで、ロータの回転方向を判断することができる。
(もっと読む)
回転検出センサ
【課題】回転体の回転速度に依存されることなく、センサの異常を当該センサ自身により検出して出力することが可能な回転検出センサを提供する。
【解決手段】回転体30の回転に応じてそれぞれパルス状の回転検出信号S1、S2を出力する2つの回転検出部1と、回転検出部1からそれぞれ出力される2相の回転検出信号S1、S2に基づいて、回転体30の回転方向を検出する回転方向検出部4と、回転検出部1の異常を検出する異常検出部6と、回転検出部1が正常な場合には、回転体30の回転方向及び回転速度を示すパルス状の第1出力信号及び第2出力信号を生成して出力し、回転検出部1の一方が異常である場合は、第1出力信号及び第2出力信号とは異なるパルス形状を有し、異常状態及び回転体30の回転速度を示す第3出力信号を生成して出力する信号処理部8と、を備える。
(もっと読む)
センサ付軸受装置
【課題】外部磁束に強く、高分解能な回転状態信号を出力可能なセンサ付軸受装置を提供する。
【解決手段】内輪16と外輪18との間にボール20が配置された軸受12と、回転輪としての内輪16に支持または、一体に形成された回転部材22と、静止輪としての外輪18に支持されて回転部材22の外周面を包囲する円筒部材26と、円筒部材26に配置された一対の検出コイル28、30と、各検出コイル28、30の出力にしたがって回転部材22の回転状態を検出する回転状態検出器とを備え、回転部材22は、磁性材料で構成され、回転部材22には軸方向に伸びる溝24が複数状形成され、円筒部材26には回転部材22の相対回転位置に応じて溝24との重なり具合が変化するように窓32、34が複数列形成され、各列の窓32、34が各検出コイル28、30によって包囲され、検出コイル28、30からは回転部材22の回転状態を示す2相信号が出力される。
(もっと読む)
車体挙動測定装置
【課題】路面を撮影することにより、車体の振動、傾斜、車高、車速、方向変化等の、車体の挙動を高速で且つ正確に測定する車体挙動測定装置を得る。
【解決手段】路面撮影部5では路面に投射した格子像12等の所定の画像を撮影し、画像処理部13を経て解析演算部14でこれを解析し、相似形の変化により車高を検出し、1車輪側または1車軸側等のゆがみにより車体の傾斜を検出し、特定車輪や車軸方向へのぶれにより車体振動を検出する。また、路面を撮影した路面上の特徴点の画像の解析演算を行い、その際別途得た車体振動データにより補正を行い、それにより路面の特徴点の長さによって車速を測定し、路面の特徴点の方向変化により車両の方向変化を測定する。車体振動データとしては、路面に投影した格子枠画像の振動データを利用することにより、正確な車体振動補正用信号が得られ、正確な車速等のデータを得ることができる。
(もっと読む)
車輪用軸受装置
【課題】車輪の回転速度に加えその回転方向を検知することができるとともに、安価に製造することができる車両用軸受装置を提供する。
【解決手段】内周に複列の外側転走面が形成された外輪2と、外周に複列の外側転走面に対向する内側転走面が形成された内輪3と、この内輪3および外輪2のそれぞれの転走面間に転動自在に収容された複列の転動体4と、内輪3に固定され、円周方向に亙る磁気特性を等間隔に変化させたエンコーダ7と、該エンコーダ7に所定の軸方向のエアギャップを介して対向配置された回転速度センサ11とを備えた車輪用軸受装置1において、エンコーダ7は、円周方向に亙って3段階以上の磁気強度を有し、当該3段階以上の磁気強度が回転速度センサ11に対して繰り返し及ぼされるよう形成されたものである。
(もっと読む)
船艇の速度検出装置
【課題】 1つの装置で速度と前進/後進識別とができる船艇の速度検出装置を提供することを課題とする。
【解決手段】 図(a)は8枚羽根パドル50の側面図であり、前記パドルの羽根は、センサ33で検出するパルスパターンが回転方向によって変わるように磁化羽根42a〜42cと非磁化羽根43a〜43eを配置する。(b)、(c)はそれぞれ船艇の前進/後進時におけるパルスパターンであり、特定の磁化羽根により互いに異なるパルス間隔T、T1、T2のパルスを発生する。演算部44は、パルス間隔Tと次のT1又はT2によって船艇の前進/後進を認識し、船艇の速度演算は、あるパルス間隔Tを基準にしてTの発生周期T0を求め、T0に基づいてパドルの回転速度を算出し、船艇の速度を演算する。
【効果】本発明方法は、パドルの回転によって速度を検出し、加えて、パドルの回転方向によって船艇の進行方向を判定することができる。
(もっと読む)
進行方向検出装置
【課題】 簡易な構成で、車両の進行方向を検出する。
【解決手段】 進行方向判定処理部は、車輪速センサにより検出された車輪速ω1を、時刻t1の車輪速ωaとして格納する(S201)。また、進行方向判定処理部は、t秒経過した後に、車輪速ωaを、時刻t2の車輪速ωbとして格納する(S202,203)。車輪速ωbが車輪速ωaより大きく、且つ加速度センサにより検出された加速度αが0より大きい場合には、“前進”が判定される(S206)。車輪速ωbが車輪速ωaより大きく、且つ加速度αが0より小さい場合には、“後進”が判定される(S207)。車輪速ωbが車輪速ωaより小さく、且つ加速度αが0より大きい場合には、“前進”が判定される(S209)。車輪速ωbが車輪速ωaより小さく、且つ加速度αが0より小さい場合には、“後進”が判定される(S210)。
(もっと読む)
1 - 12 / 12
[ Back to top ]