
Fターム[2F034EA26]の内容
運動の有無又は方向の指示又は記録 (1,376) | 運動方向の正逆、左右の検出 (197) | その他 (3)
Fターム[2F034EA26]に分類される特許
1 - 3 / 3
気圧センサを用いて昇降移動状態を推定する携帯装置、プログラム及び方法
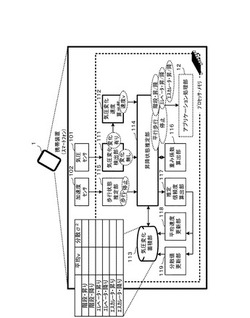
【課題】携帯装置に搭載された気圧センサを用いて、利用者の昇降状態をできる限り高い精度で推定することができる携帯装置等を提供する。
【解決手段】昇降状態毎に、その昇降状態時における気圧変化速度に基づく平均vu ̄及び分散σu2を予め記憶した気圧変化記憶手段113と、気圧センサ101によって計測された時間経過に伴う気圧値について、所定時間範囲に所定閾値以上で変化したか否かを検出する気圧変化検出手段111と、気圧変化検出手段によって真と判定された際、当該気圧値における気圧変化速度vを算出する気圧変化速度算出手段112と、気圧変化記憶手段に記憶された平均vu ̄及び分散σu2を用いて、昇降状態毎に、気圧変化速度vにおける正規確率分布を算出し、最も高い確率値となる昇降状態を、当該昇降状態として推定する昇降状態推定手段114とを有する。
(もっと読む)
車両用制御装置

【課題】横加速度の向きとヨーレートの向きを利用して車両の前進または後退を精度良く判定する。
【解決手段】車両用制御装置は、横加速度ayとヨーレートωとに基づいて車両の前進・後退を判定する進行方向判定手段24と、横加速度ayと基準値との偏差である横加速度変動量Δayを算出する変動量算出手段23と、転舵速度算出手段22とを備える。進行方向判定手段24は、ステアリングを左に操舵するときの転舵速度Δθの符号と、安定して左旋回しているときに作用する横加速度ayの符号を正と規定し、ステアリングを右に操舵するときの転舵速度Δθの符号と、安定して右旋回しているときに作用する横加速度ayの符号を負と規定したとき、横加速度変動量Δayの絶対値が第1の所定値以上であり、かつ、横加速度変動量Δayおよび転舵速度Δθのうち、一方が正であり、他方が負であるとき、車両が前進しているという判定を行わないように構成される。
(もっと読む)
回転検出センサ
【課題】回転検出センサPにその回転方向検出の方向性が設定されている場合、その方向を容易に判別できるようにする。
【解決手段】被検出体Bの回転による磁界変動によりその被検出体Bの正逆回転方向及び回転数を検出する回転検出センサPであり、この回転検出センサを、被検出体Bに対向させた際、その被検出体Bの回転方向が正逆回転方向のいずれか判別できる表示bを有する。このように、外観上、回転検出センサの検出正逆回転方向の方向が確認できれば、その方向が所要の方向、例えば、車両の左車輪の正回転方向となるように、その回転検出センサを容易に設置することができる。このため、その回転検出方向を誤って回転検出センサを取付けることもなくなる。
(もっと読む)
1 - 3 / 3
[ Back to top ]