
Fターム[2F062DD09]の内容
機械的手段の使用による測定装置 (14,257) | 補正、補償、較正、調整 (452) | 補正、補償 (168) | 遊び、ガタ (5)
Fターム[2F062DD09]に分類される特許
1 - 5 / 5
傾斜計を用いて関節アーム座標測定機の取り付けの安定性を評価するための方法
可搬型の関節アーム座標測定機が、基部と、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含む、アーム部と、トランスデューサからの位置信号を受信する電子回路と、基部に結合された第1の傾斜計であって、基部の傾斜の角度に応じた第1の電気信号を生成するように構成された、第1の傾斜計と、第1の傾斜計の第1の読み取り値および第1の傾斜計の第2の読み取り値を記録するように構成された電気的システムであって、第1の読み取り値が、基部に加えられた第1の力および取り付け構造に加えられた第3の力のうちの少なくとも1つに応じたものであり、第2の読み取り値が、基部に加えられた第2の力および取り付け構造に加えられた第4の力のうちの少なくとも1つに応じたものである、電気的システムとを含む。 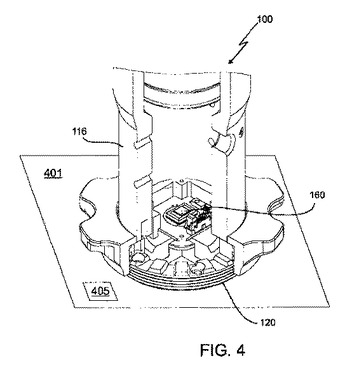 (もっと読む)
(もっと読む)
測定装置および積層体の形成方法
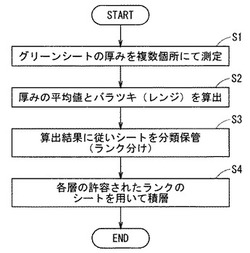
【課題】グリーンシートの厚みの測定精度を向上させ、さらに積層体形成に利用するグリーンシートの歩留まりを高める方法を提供する。
【解決手段】複数のセラミックグリーンシートについてそれぞれの厚みを測定し、得られた厚みの測定値の平均およびバラツキと、あらかじめ定められたランク分け基準とを照合することにより、複数のセラミックグリーンシートをそれぞれ、ランク分け基準において設定されている複数のランクのいずれかに分類するランク分けを行い、積層体を形成する際には、積層体のそれぞれの層を構成するセラミックグリーンシートに、複数のランクのうち使用することがあらかじめ許容されているランクに属するセラミックグリーンシートのみを用いるようにする。
(もっと読む)
加工品の表面点に接触するための方法および装置

【課題】加工品に接触する際にヒステリシス効果を最小限にする代替方法を提供する。
【解決手段】プローブヘッド基部56と触針22とを有するプローブヘッド26が提供され、前記触針22は、プローブヘッド基部56に対して移動可能である。触針22は、プローブヘッド基部56に対して画定された静止位置を有している。接触のために、触針22が表面点に画定された接触力で触れるまで、プローブヘッドが加工品に対して移動する。静止位置に対する触針22のヒステリシス作用を表す補正データ記録74が提供され、接触力が補正データ記録74を用いて定められる。
(もっと読む)
測定機の真直精度補正方法および測定機
【課題】反転法の欠点を解消でき、かつ、既存の装置を改良することなく信頼性の高い測定データが得られる測定機の真直精度補正方法を提供する。
【解決手段】直動機構を有する測定機の真直精度補正方法であって、測定機1の直動機構(4,5)を使って検出器7を移動させながら、予め形状データが値付けされたマスターワークMWを測定し、そのマスターワーク測定データから前記値付けされた形状データを差し引いて直動機構の真直精度データを求める真直精度データ算出工程と、前記測定機の直動機構を使って検出器を移動させながら、ワークを測定し、そのワーク測定データを求めるワーク測定データ算出工程と、前記ワーク測定データから前記真直精度データを差し引いてワークの真値データを求めるワーク形状演算工程とを備える。
(もっと読む)
形状測定機
【課題】 測定速度の向上及び傾斜の大きな被測定物に対する測定精度の向上を図る。
【解決手段】 被測定物18に対して、プローブ14を備えた測定部15を移動可能に支持するスライド8からなるガイド手段を設ける。スライド8を駆動することにより測定部15を移動させるアクチュエータ7を設ける。測定部15の位置を検出するスケールヘッド17及びガラススケール16からなる位置検出手段を設ける。アクチュエータ7とスライド8とを、衝撃吸収部材13a、13bを介して接続する。
(もっと読む)
1 - 5 / 5
[ Back to top ]