
Fターム[2F069MM33]の内容
測定手段を特定しない測長装置 (16,435) | 特定の構造について言及するもの (1,066) | 駆動装置 (203) | スピンドルの (7)
Fターム[2F069MM33]に分類される特許
1 - 7 / 7
産業機械
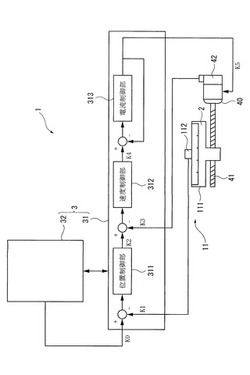
【課題】 移動機構の位置に基づく信号を出力するリニアエンコーダの原点位置を検出する動作を不要にでき、短時間で測定を開始できる産業機械を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させるスピンドル2と、スピンドル2の位置を制御することにより制御対象物の位置を制御する制御装置3とを備えるものであって、スピンドル2の絶対位置を出力するアブソリュート型のリニアエンコーダ11を備える。このため、三次元測定機1による測定を短時間で開始できる。
(もっと読む)
工作機械用測定方法

【課題】本発明は、工作機械上の被加工物を測定する方法及び装置を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。また、いくつかの方法で前提の機械位置の値と実際の値との間の誤差を補償する。
(もっと読む)
形状測定装置
【課題】複数台の測定機間での振動の影響を排除した上で高い操作性と測定精度を実現した新たな形状測定装置を提供する。
【解決手段】形状測定装置は、被測定物50を挟んで対向配置される少なくとも2台の駆動機構付き測定機CMM1,CMM2と、これらの測定機ごとにそれぞれ対応して接続される少なくとも2台の制御装置41,42と、を備えるものであって、前記制御装置41,42は、測定機CMM1,CMM2の動作状態を検出自在であるとともに、制御装置41,42ごとで連携を取り合うことにより、一の測定機CMM1の動作状態の検出結果に応じて他の測定機CMM2に対する動作指令を発信自在である。
(もっと読む)
形状測定装置
【課題】高い操作性を有する新たな形状測定装置を提供する。
【解決手段】形状測定装置は、被測定物60を挟んで対向配置される少なくとも2台の駆動機構付き測定機CMM1,CMM2と、これらの測定機ごとにそれぞれ対応して接続される少なくとも2台の操作コントローラ51,52と、を備えるものである。そして、操作コントローラ51,52のそれぞれは、非接続の測定機CMM2,CMM1を含むすべての測定機を操作可能に構成されている。また、操作コントローラ51,52は、切替ボタン53,54を有しており、この切替ボタンを切り替えることによって操作対象となる測定機を選択可能となっている。
(もっと読む)
三次元座標測定システム及びそれに用いるパートプログラム
【課題】 安価な構成で且つ直前の測定方向に左右されず、ヒステリシスの影響を一定にして高精度な測定を可能にする。
【解決手段】 被測定物にプローブが接触したときのプローブの三次元位置の情報から測定要素のパラメータを算出する三次元測定システムにおいて、プローブを被測定物の測定点に同じ方向から2回連続して接触させ、このうちプローブが後で接触したときの三次元位置の情報のみを取り込んで測定要素のパラメータを算出する。
(もっと読む)
円すい面形状測定装置
【課題】 測定子の移動精度を容易に確保でき、高精度な3次元形状の測定を可能としながら、コストの低減が可能な円すい面形状測定装置を提供する。
【解決手段】 円すい面形状を有する被測定物Wを、その円すい面の中心軸が回転中心に一致するように支持するターンテーブル1と、被測定物Wの表面に接触または近接して被測定物表面の変位を測定可能な測定子2を設ける。ターンテーブル1に支持された被測定物Wの円すい面の母線と平行に上記測定子2を移動させる測定子移動機構3を設ける。測定子移動機構3は、ターンテーブル1に対する径方向移動体9と、この径方向移動体に傾斜角度変更自在に支持された傾動体10とを備え、この傾動体10にエアースライド装置5を介して測定子2を支持する。ターンテーブル1は、静圧空気軸受31で支持する。
(もっと読む)
座標位置決定装置の較正のための方法
座標位置決定装置によって対象物の測定を行う方法にあって、前記座標測定機械の作業容積内に前記対象物を配置するステップと、ワークピース接触プローブにより前記対象物を測定するステップであって、複数のプローブ力で収集された測定データを作成するステップと、前記対象物の表面の少なくとも1つの位置について、前記測定の誤差データを前記プローブ力に関連付ける関数またはルックアップテーブルを決定するステップと、前記対象物の表面の前記少なくとも1つの位置について前記関数またはルックアップテーブルを使用し、前記プローブ力がゼロであるときに対応した測定データを決定するステップと、前記プローブ力がゼロであるときに対応した測定データを前記対象物の測定値として出力するステップと、を具える。
 (もっと読む)
(もっと読む)
1 - 7 / 7
[ Back to top ]