
Fターム[2F112AD05]の内容
光学的距離測定 (16,745) | その他の光学的距離測定 (821) | 三角測量の原理によるもの (43)
Fターム[2F112AD05]の下位に属するFターム
測距装置内に基線を有するもの (11)
Fターム[2F112AD05]に分類される特許
1 - 20 / 32
計測装置、計測方法、及びプログラム
【課題】平坦でない路面上に存在する対象物の高さを正確に計算することができる計測装置、計測方法、及びプログラムを提供する。
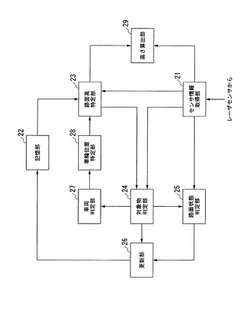
【解決手段】センサ情報取得部21は、基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、基準位置から当該レーザが反射された点である反射点までの距離を計測するレーザセンサから計測結果を取得する。路面高特定部23は、記憶部22が記憶する路面高情報に基づいて反射点それぞれにおける路面高を特定する。高さ算出部29は、レーザセンサが算出したそれぞれの距離と路面高特定部23が特定した路面高とに基づいて、路面から前記反射点までの長さを対象物の高さとして算出する。
(もっと読む)
測距装置

【課題】対象物が存在する路面の勾配の影響を適切に補償しつつ、車載カメラによる撮像画像を用いて対象物と自車両との間の距離を精度よく測定することができる測距装置を提供する。
【解決手段】互いに異なる撮像時刻での車載カメラ2の2つの撮像画像から、自車両1からの距離が第1撮像画像の撮像時刻での対象物53の接地点P53と同じになる静止点Pの投影点となる特徴点を抽出する。計測したカメラ運動パラメータと、各撮像画像の特徴点の位置と、車載カメラ2の高さHcの値とから、車載カメラ2の下方に位置する路面51上の点から対象物存在路面52上の静止点に至る直線L2が車載カメラ2の光軸Lcに対してなす角度θを所定の演算式に基づいて推定する。角度θの推定値を用いて対象物53と自車両1との間の距離Dを推定する。
(もっと読む)
測距装置
【課題】単一の車載カメラによる撮像画像を利用する安価なシステム構成で、該車載カメラにより撮像される対象物と自車両と対象物との間の距離を高い信頼性で行なうことができる測距装置を提供する。
【解決手段】撮像画像から抽出された対象物53の撮像画像中でのサイズと標準サイズ値との比率を基に、第1距離推定値D1を決定する。また、自車両1からの距離が対象物53の接地点P53と同じになる静止点Pを撮像画像に投影してなる特徴点を抽出し、少なくともその特徴点の位置に基づいて第2距離推定値D2を決定する。第2距離推定値D2が所定の許容範囲に収まっているか否かを判断し、その判断結果に応じて、第1距離推定値D1と第2距離推定値D2とのうちの一方を対象物53の自車両1からの距離の推定値として確定する。
(もっと読む)
目標距離検出装置
【課題】従来、目標を検出したときの見下ろし角により目標寸法に誤差が発生していた。
【解決手段】画像センサで得られた目標画像を表示すると共に、その表示画像から測距対象の目標寸法の指定が可能な操作表示器と、複数種類の目標の目標寸法を格納した目標寸法テーブルと、操作表示器で指定された目標の種類に基づいて目標寸法テーブルから目標寸法を検索する目標寸法検索器と、目標寸法検索器で検索された目標寸法を画像センサの首振り角で換算して目標寸法換算値を出力する目標寸法換算器と、目標寸法換算値と、画像センサが出力する画像の総画素数と、目標が占有する縦方向又は横方向の画素数とから、前記画像内の目標が存在する位置における目標面表示範囲を算出する目標面表示範囲算出器と、目標面表示範囲と画像センサからの画角とから目標までの距離を算出する距離算出器を備える。
(もっと読む)
車両用画像認識装置
【課題】測距対象までの測距結果の精度を高めることが可能な補正機能を備えている、車両用画像認識装置を提供すること。
【解決手段】車両周辺の画像を出力する撮像手段(単眼カメラ11)と、測距対象の前記画像上の縦方向位置を前記画像から実測することによって、前記測距対象までの距離を計測する計測手段(立体物抽出部15,距離補正部16)とを備え、前記計測手段は、前記測距対象までの距離を計測する方法とは別の方法で距離が測定された道路標示の前記画像上の縦方向位置によって、前記測距対象までの距離の補正をする、車両用画像認識装置。
(もっと読む)
車両用画像認識装置
【課題】測距対象までの距離を単眼カメラによる撮像画像からでも精度良く算出できる、車両用画像認識装置を提供すること。
【解決手段】単眼カメラ11と、単眼カメラ11による撮像画像から道路標示の所定部位を抽出する道路標示抽出部12と、前記所定部位の前記撮像画像上の左右方向の長さを検出する大きさ検出部13と、前記所定部位の実際の左右方向の長さと大きさ検出部13により検出された前記撮像画像上の左右方向の長さと単眼カメラ11の角度分解能とを用いて、前記道路標示までの距離を算出する距離算出部14とを備える、車両用画像認識装置。
(もっと読む)
距離測定装置
【目的】簡単な操作で測定対象物間の間隔や測定対象物の高さを測定できる距離測定装置を提供する。
【構成】レーザ光を出射する発光部20と、発光部20からの出射光をターゲット5に照射する対物レンズ14と、ターゲット5からの反射光を受光レンズ15を介して受光する受光部25と、受光部25で受光された反射光に基いてターゲット5までの距離を求める距離計算部41Aとを備えている距離測定装置1において、2つのターゲット5a,5bに対する視野角を設定する視野角設定部(回転リング31、回転位置検出ポテンショメータ32及び角度計算部33)を設けるとともに、この視野角設定部で設定された視野角と距離計算部41Aで求められた距離測定結果とに基いて2つのターゲット5a,5b間の距離を演算する間隔計算部41Bを設けた。
(もっと読む)
撮影システム
【課題】スポーツ中継、特に競馬中継やトラック競技中継などの撮影を行う際、複数の競走馬や選手等の主被写体を撮影した状態で、撮影画面に映っていないゴールまでの距離を情報として画面上に表示する。
【解決手段】本発明の撮影システムは、被写体を撮影する撮影手段と、該撮影手段の撮影画角内の被写体の被写体距離を測定する測距手段と、該撮影手段をパン方向、チルト方向に回動する回動手段と、該回動手段を所定の場所に支持する支持手段と、該回動手段のパン角及びチルト角を検出するパン・チルト角検出手段と、該測距手段で得られた被写体距離及び前記パン・チルト角検出手段で得られたパン角及びチルト角に基づいて、該被写体と、回動手段の所定のパン角のときの光軸の方向と鉛直方向を含む平面である基準面との間の距離を算出する距離算出手段と、を有する。
(もっと読む)
車両用距離算出装置
【課題】本発明は、撮像環境下の日照条件が変化した場合でも、正確に対象物までの距離を算出することができる車両用距離算出装置を提供する。
【解決手段】撮像手段101は、自車両の所定位置に、その撮像範囲内に自車両の一部が入るように設置され、自車両および自車両の周辺を撮像する。自車領域抽出手段102は、撮像手段101によって撮像された画像から自車両の領域を抽出する。画質推定手段103は、自車領域抽出手段102によって抽出された自車両領域の画像を解析して入力画像の画質を推定する。画質調整手段104は、画質推定手段103による推定結果に基づき入力画像の画質を調整する。対象物検出手段105は、画質調整手段104によって調整された映像を処理して対象物を検出する。距離算出手段106は、対象物検出手段105によって検出された対象物までの距離を算出する。
(もっと読む)
架空ケーブルの地上高測定装置
【課題】ケーブル状の細い被測定部でも簡単に地上高さを測定する。
【解決手段】略上方の所定の立体角の範囲で測長レーザー光を2次元走査して測長を行なうレーザーレーダと、該測長レーザー光の照射方向と鉛直方向の成す角度と、該測長の結果とに基づき前記範囲内における最低の鉛直高さを得るコンピュータと、該最低の鉛直高さを数値で表示する表示器と、を備えた。範囲内の2次元走査は1乃至数秒以内で行なえることが望ましい。走査後に、最低値が得られたレーザー照射方向に固定して照射を行い、ケーブルに当たったレーザー光を目視で確認できるようにしても良く、或いは範囲内の各所での測定結果を被測定物の形状や位置が認識できるようにグラフィカル表示してもよい。
(もっと読む)
画像処理装置および方法、並びに、プログラム
【課題】迅速に所望の精度で移動ステレオ方式により物体までの距離を計測する。
【解決手段】障害物検出部123は、撮像部111により異なる位置で撮像された画像を用いて、移動ステレオ方式により障害物までの距離を計測する。必要移動量設定部141は、障害物検出部123により計測された障害物までの距離に基づいて、計測に用いられた2つの画像のうち後に撮像された画像の撮像位置から次の計測に用いる画像の撮像位置までの距離である必要移動量を設定する。本発明は、例えば、車載用の障害物検出装置に適用できる。
(もっと読む)
距離計測装置及び距離計測方法
【課題】エッジ検出の精度に依存することなく高精度に距離を計算できるようにした、距離計測装置及び距離計測方法を提供する。
【解決手段】カメラ101、201、301と、カメラ101、201、301により取得された画像を用いて距離を算出するマイクロプロセッサ106、210とを有し、少なくとも3個以上のレーザ光を発生させるレーザ発生装置102、202、302と、レーザ発生装置の照射面とカメラのレンズ面とが同一面となるように配置される冶具103、203とを備えて構成する。
(もっと読む)
距離測定装置、距離測定方法及び距離測定プログラム
【課題】本発明は、携帯電話機等の携帯装置を用いた距離測定に関し、カメラ及び加速度センサによる重力加速度の測定値を利用して、より簡易な構成で距離測定を可能にし、距離測定処理の負担を軽減させることにある。
【解決手段】距離の測定対象を含む画像をカメラ部(カメラ7)より取得し、その画像を表す表示情報を生成する表示処理部12と、表示処理部を備える装置筐体(筐体部38)に設置され、この装置筐体の傾斜角度に対応する重力加速度成分を出力する加速度センサ部(加速度センサ3)と、表示処理部で生成される表示情報中に測定対象を表す画像が補足された状態で加速度センサ部から取り込まれる重力加速度成分から傾斜角度を算出し、この傾斜角度を用いて測定対象までの距離を演算する距離測定処理部10とを備える構成である。
(もっと読む)
距離算出装置および算出プログラム
【課題】移動物体と対象物との間の方位角や、速度、ヨーレートなどの各種の状態量に基づいて、移動物体と対象物との間の距離を正確に算出することを目的とする。
【解決手段】算出装置1は、移動物体と対象物との間の方位角を算出する手段2と、2つの時点間の移動物体の移動距離を算出する手段3と、移動方向の角度変化量を算出する手段4と、手段2、手段3、手段4の出力を用いて移動物体から対象物までの直線距離を算出する手段5とを備える。
(もっと読む)
可視光通信システムを利用した位置測定システム、位置測定装置及び位置測定方法
【課題】可視光通信システムを利用し、容易に実用化を図ることが可能な位置測定システムを提供することにある。
【解決手段】位置情報を可視光信号で発信する可視光通信ビーコンと、1台のカメラにより撮像した画像情報とを使用して、車両1の現在位置を測定する位置測定システムである。可視光通信ビーコンは、道路照明柱3に設けられた道路照明灯30及び可視光通信装置31からなる。車両1は、1台のカメラを搭載し、可視光信号310から可視光通信ビーコンの位置情報を復調して、現在位置を算出する車両位置計測装置10を有する。
(もっと読む)
物体認識装置および物体認識方法
【課題】距離画像を使用して高速かつ高精度に物体の種類や向き、数等を識別することができる物体認識装置を提供すること。
【解決手段】物体認識装置は、レンジファインダ等の対象物の表面の距離画像を取得する手段、設定された単位長情報に基づいて距離画像から離散化距離画像データを生成する手段、離散化距離画像データから立体高次局所自己相関によって特徴データを抽出する手段、予め学習した情報に基づいて多変量解析を行って、特徴データから対象物の種類、姿勢、個数の内の少なくとも1つを判定する手段を備える。対象物の切り出しやマッチング処理を行わずに対象物を認識するので、計算量が少なく、実時間処理が可能である。また、物体の種類と共に個数や姿勢(向き)も判定可能である。
(もっと読む)
距離計測装置、距離計測プログラムおよび距離計測方法
【課題】長い距離を計測するのに際しても、大型の装置を必要とせず、正確に前方の物体までの距離を計測することを課題とする。
【解決手段】距離計測装置は、撮像された物体の画像から画素値を取得して、物体における放射強度を画素値から算出し、また、物体の画像から物体の位置情報を取得して、移動体からの視線ベクトルと光軸のなす角度を位置情報から算出する。そして、移動体が第一の地点から第二の地点に移動した場合に、距離計測装置は、当該移動量を計測する。そして、移動後の第二の地点において、距離計測装置は、計測する物体までの距離に比べて移動量が十分小さい場合に、第一の地点と第二の地点との間で、視線ベクトルと物体における任意の一点に対する面法線ベクトルとがなす角度が等しいと近似した上で、第一の地点および第二の地点において、それぞれ算出した放射強度と角度と計測された移動量とを用いて、物体までの距離を算出する。
(もっと読む)
測量装置
【課題】本発明の目的は、装置構成を複雑にすることが無く、一人で容易に基準点に対する測定点の高さ・距離を測量できる測量装置を提供することにある。
【解決手段】本発明の測量装置10は、基準点Aと測定点Bに機材を配置して測量をおこなうものである。基準点Aからファンビーム12を発光して、測定点Bでファンビーム12を受光する。ファンビーム12を回転させて、受光器22a,22bで受光する。受光する時間差T1、T2を用いて基準点Aに対する測定点Bの距離と高さを求める。基準点Aには人手は不要で測定点Bに人手が必要となり、一人で測量をおこなうことができる。
(もっと読む)
車両から信号機までの距離測定方法
【課題】焦点距離、高さ、仰角のCCDカメラで撮影し、車両から信号機までの距離を測定する距離測定方法において、焦点距離、高さ、仰角のいずれかが未知数である場合であっても前記距離の測定ができるようにすること。
【解決手段】線路2と信号機を含む場面を、線路2上を走行する車両に搭載された焦点距離f、高さh、仰角θのCCDカメラで撮影し、ワールド座標系で表される線路2と信号機を含む場面とイメージ座標系で表される前記場面の画像との間に座標系の変換手法により成立する関係式と、線路2の幅Wは一定という関係式とをコンピュータで演算処理し、前記車両から信号機までの距離Z’を測定するようにした。
(もっと読む)
距離計測機能を備えた携帯電話
【課題】常に携帯して使用することができる距離計測機能を備えた携帯電話を得る。
【解決手段】カメラ付き携帯電話において、距離計測スケールを記憶するスケール記憶部と、前記カメラで撮像された画像と前記距離計測スケールを重ね合わせた合成画像を生成するレイヤ処理部と、前記合成画像を表示する表示部と、前記カメラで撮像された画像及び前記スケール記憶部から読み出した距離計測スケールを前記レイヤ処理部へ送信し、前記表示部での前記レイヤ処理部で生成した合成画像の表示を制御する制御部とを備える。
(もっと読む)
1 - 20 / 32
[ Back to top ]