
Fターム[2F129BB43]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | スケールファクタ (22)
Fターム[2F129BB43]に分類される特許
21 - 22 / 22
測位航法用擬似距離推定回路、移動体測位装置及び移動体測位方法
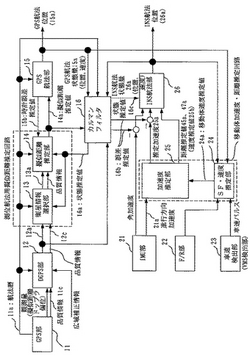
【課題】INSとGPSの両航法における位置情報の入力側の正確度を高め、更に帰還情報の質を高めて、結果的により正しい位置情報を得る。
【解決手段】本発明の移動体測位装置は、測位衛星からの複数の擬似距離と、また測位航法部と慣性航法部とカルマンフィルタと、により移動体の航法位置を求める測位装置において、測位衛星と移動体間のドップラ観測値と、航法暦とカルマンフィルタ出力とにより測位衛星と移動体間の相対速度の計算をしてドップラ推定値を求め、複数の擬似距離から選択擬似距離を出力する衛星情報選択部13と、測位衛星から得る搬送波位相情報と選択擬似距離とカルマンフィルタの出力とで演算出力する擬似距離推定部14とを備えて、測位航法部15は、擬似距離推定値を入力として、測位航法速度と測位航法位置を出力し、カルマンフィルタ16は、擬似距離推定値と、測位航法部の出力と慣性航法部の出力とで状態推定値を求める。
(もっと読む)
車両の相対方位検出装置

【課題】 ジャイロセンサを利用することなく、かつ、精度良く、車両の相対方位を検出することができる車両の相対方位検出装置を提供する。
【解決手段】 この相対方位検出装置は、車両のハンドル操作に基づいて車両の相対方位を検出するものであって、操舵角度検出手段50によりハンドルの操舵角度を検出し、絶対方位検出手段20によって車両の絶対方位を検出し、検出された操舵角度と絶対方位とに基づいて単位操舵角度あたりの方位変化量を係数として算出し、ハンドル操作時に操舵角度と予め求められている当該係数とに基づいて車両の相対方位を算出する。
(もっと読む)
21 - 22 / 22
[ Back to top ]