
Fターム[2F129EE56]の内容
航行(Navigation) (246,646) | 出力/表示 (50,983) | 出力/表示の対象 (25,611) | 経路 (6,852) | 復路 (43)
Fターム[2F129EE56]に分類される特許
41 - 43 / 43
車載ナビゲーション装置
【課題】車両が案内経路を逸脱した場合には、ユーザの所望するタイミングにて案内経路を再探索すること。
【解決手段】車両が案内経路を逸脱した場合、コンピュータ30に車両の現在位置から目的地までの案内経路の探索を開始させるべき条件を示す探索開始条件をユーザが設定することができる。車両が案内経路を逸脱し、かつ設定された探索開始条件が満たされた場合に限り、コンピュータ30は車両の現在位置から目的地までの案内経路を探索することができる。これにより、車両が案内経路を逸脱した場合には、ユーザの所望するタイミングにて案内経路を再探索することができる。
(もっと読む)
車両用ナビゲーション装置及び道路地図配信システム

【課題】車両が地図データにない道路を走行した場合に、その走行軌跡を高精度に求め、また、その走行軌跡に基づいて、実際の道路形状に近似した道路データを作成すること。
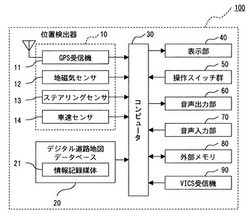
【解決手段】位置検出器1からの信号に基づいて算出される自車位置の位置情報、及びマップマッチング処理によって自車位置を道路上の位置に修正したマップマッチング位置の位置情報がメモリに記憶される。これら自車位置及びマップマッチング位置に関する位置情報を用いて、自車両が地図データに記憶されている記憶道路を逸脱した地点、及び記憶道路に復帰した地点を決定する。この結果、車両が記憶道路を逸脱してから記憶道路に復帰するまでの走行軌跡を高精度に求めることができる。その走行軌跡に基づいて、実際の道路形状に近似した道路データを作成できる。
(もっと読む)
オブジェクトの将来の動きを予測するための装置および方法
車輌等のオブジェクトの将来の動きを予測するための装置を提供する。GPSレシーバ(6)等の場所および時刻決定システムは、車輌の地理的な場所および現在の時刻を決定し、プログラムメモリ(2)を有するコンピュータ(1)等のプロセッサにこれを提供する。プロセッサは、定期的に場所および時刻を記録し、車輌の観察記録を生成する。プロセッサ(1,2)は、記録に含まれる以前に記録した観察と、最近の観察にかかるシーケンスとを比較し、一致するシーケンスを検出する。一致するシーケンスとは、所定の最小距離にわたって一致を示す行路区分である。プロセッサ(1,2)は、一致するシーケンスに続くいくつかの観察を検索し、これらから例えば車輌の採りそうな将来のルートや目的地等の将来の動きを予測する。 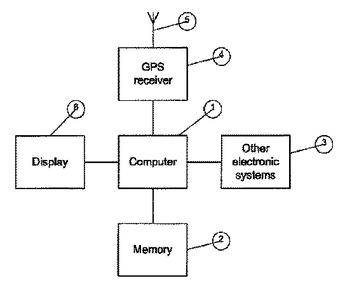 (もっと読む)
(もっと読む)
41 - 43 / 43
[ Back to top ]