
Fターム[3C007EW09]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の目的 (376) | 開閉ロック手段を有するもの (32) | ラチェット使用 (3)
Fターム[3C007EW09]に分類される特許
1 - 3 / 3
長ストロークロボットハンド
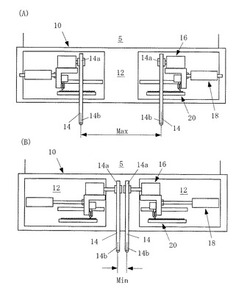
【課題】ワークの姿勢により把持爪の挿入位置と把持位置が大きく変動する場合でも、必要とする長ストロークの開閉が可能であり、かつ挿入位置を任意に設定することができ、かつ挿入位置及び把持位置にかかわらず大きな把持力を有し、かつ小型軽量化が可能である長ストロークロボットハンドを提供する。
【解決手段】搬送ロボットのハンド取付部5に取り付けられたハンド本体12と、ハンド本体に上端部が水平方向に開閉可能に取り付けられ下方に延びる1対の把持爪14と、各把持爪を所望の最大力で水平方向に移動可能な1対の流体圧アクチュエータ16と、各流体圧アクチュエータを所望の最大ストロークで水平方向に移動可能な1対の電動アクチュエータ18と、各流体圧アクチュエータを前記最大ストローク内の任意の位置で固定する位置決め装置20とを備える。
(もっと読む)
遠隔操作用把持工具

【課題】被把持物を把持しながらその遠隔操作棒の軸心方向に対する傾斜角度を容易に調節できる遠隔操作用把持工具を提供する。
【解決手段】遠隔操作棒17の先端に連結されるジョイント部材9を回転自在に保持する工具基台2に、固定側把持腕部3が回動支軸23により回動自在に支持され、固定側把持腕部3に可動側把持腕部4が回動自在に連結され傾斜した押圧ガイド斜面14aを有する押圧部材14を先端に備えた作動部材13がジョイント部材9の回転により工具基台2から可動側把持腕部4に対し接離方向に進退され且つ可動側把持腕部4に設けた受圧部材19の球状の支点部19aが回動支軸23の軸心とほぼ同一面上で押圧ガイド斜面14a上に当接され、固定側把持腕部3を手動操作で回動支軸23回りに回動したときに支点部19aが押圧ガイド斜面14a上で転動する状態で支点部19aを支点に可動側把持腕部4を回動させる角度調節機構15を備えている。
(もっと読む)
ハンドおよびその動作方法
【課題】本発明は、把持対象物を破損することなくあらかじめ設定したある一定の把持力で把持でき、把持対象物の形状に倣って包み込むように把持でき、しかも比較的簡単な構成でこれを実現できるハンドを提供する。
【解決手段】基部1と、前記基部1に固定される回転駆動機構2と、前記回転駆動機構2と連結される少なくとも2つのリンク3を備えたハンドにおいて、各リンク3は関節に動力伝達部品4とラチェット機構5を有し、前記回転駆動機構2は各関節に備えられた動力伝達部品4およびラチェット機構5にベルト6を介して連結されていることを特徴とするものである。
(もっと読む)
1 - 3 / 3
[ Back to top ]