
Fターム[3C007WB15]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型の制御 (1,266) | 行動制御(感情も含む) (795) | 内部情報を利用するもの (43)
Fターム[3C007WB15]に分類される特許
1 - 20 / 43
ロボット、ロボット制御方法およびプログラム
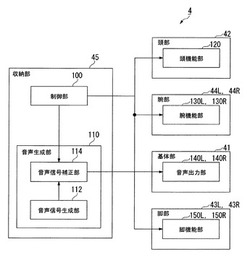
【課題】姿勢に応じて、違和感のない自然な音声を出力する。
【解決手段】ロボット4は、基体(基体41)に可動連結した可動部(例えば、頭部42)の駆動を制御する駆動制御手段(制御部100)と、音声を生成する音声生成手段(音声生成部110)と、前記音声生成手段において生成された音声を出力する音声出力手段(音声出力部140L、140R)とを有し、前記音声生成手段は、前記駆動制御手段によって制御される前記可動部の前記基体に対する姿勢に基づいて、生成する音声を補正する。
(もっと読む)
電子機器

【課題】人に生物的な擬似感覚を与える新たなペット型玩具あるいはペット型ロボットの提供。
【解決手段】燃料電池21と、燃料電池21の出力に関する情報を電気信号に変換して出力するコントローラ10と、コントローラ10から出力される電気信号に基づいて、外部から認知可能な物理的変化を提示するスピーカ18、アクチュエータ3AA1〜5A2等を備える電子機器を提供する。この電子機器では、生物個体の活動に近似した燃料電池の出力特性に応じて動作や音声出力等を制御し、ユーザに提示させることで、ユーザに生物的な擬似感覚を与えることができる。
(もっと読む)
エモーションエンジン、エモーションエンジン・システムおよび電子デバイスの制御方法
【課題】電子デバイスの製造コストを下げ、且つ電子デバイスがロボットの場合に、電子デバイスの性格をリアルに表現することのできるエモーションエンジンを提供する。
【解決手段】エモーションエンジン・システムは、行動制御ユニットと、検出ユニットと、時間ユニットと、行動データバンクとを備える。行動制御ユニットは、第1行動モード及び第2行動モードを提供する。検出ユニットは、検出ユニットがイネーブルになった時に、行動制御ユニットに対して誘発検出信号又は初期検出信号を生成する。時間ユニットは、行動制御ユニットに対してタイミング信号を生成する。行動データバンクは、複数の行動データを保存し、第1行動モード及び第2行動モードは、それぞれ行動データのうちの少なくとも1つに対応する。行動制御ユニットは、タイミング信号、誘発検出信号、及び第1行動モードに基づいて、第2行動モードに対応する行動データを決定する。
(もっと読む)
ぬいぐるみロボット
【課題】玩具としてだけでなく、人間にとって癒しの効果を有し、かつ、人間とコミュニケーションをとることのできるぬいぐるみロボットを提供する。
【解決手段】弾力性を有する充填材料4からなる動作部2と、充填材料4の内部を貫通するように、又は充填材料4の外側に沿うように配設された少なくとも1本の糸3(3a〜3c)と、糸3の巻き取り、巻出しを行うモータと、糸3(3a〜3c)の長さを検出するエンコーダと、糸3(3a〜3c)の張力を検出するセンサ部と、エンコーダ及び前記センサ部から検出された値に基づいて、モータを制御する制御部とにより、ぬいぐるみロボットを構成する。
(もっと読む)
移動ロボットの制御装置および移動ロボットシステム
【課題】外界センサにもとづく位置推定処理の遅れの影響を軽減し,目標位置への正確な位置決めを可能とし,多くの外界センサや位置推定処理アルゴリズムを利用可能であり,なおかつ追加コストのかからない移動ロボットの制御装置を提供する。
【解決手段】外界センサによる環境計測時の推定現在位置を記憶する計測推定位置記憶部を備え,記憶した環境計測時の推定現在位置と前周期の推定現在位置とを利用して外界センサにもとづく位置推定結果を補正する。
(もっと読む)
脚式移動ロボットの制御装置
【課題】対象物を、その移動形態の要求条件に適した姿勢で移動させることができる移動ロボットの制御装置を提供する。
【解決手段】対象物Wの代表点の位置と対象物Wの姿勢とをそれぞれ目標位置軌道、目標姿勢軌道に追従させるように対象物Wを移動させる作業を行う移動ロボット1の制御装置であって、対象物Wの目標姿勢軌道における目標姿勢は、対象物Wのヨー軸に対して直交する方向で該対象物Wに対してあらかじめ設定された基準方向と、目標位置軌道により規定される対象物Wの代表点の移動速度ベクトルVの方向との間のヨー軸まわりの角度差の目標値θを含む。この角度差の目標値を、少なくとも対象物Wの移動形態に関する要求条件に応じて可変的に設定する角度差目標値設定手段45を備える。
(もっと読む)
リモコン
【課題】ロボットが一定領域からはみ出さず、かつ、物体との接触を回避するように、ユーザがこのロボットの行動を操作することができるリモコンを提供する。
【解決手段】ユーザによる指定経路が安定移動要件を満たしている場合、リモコン2からロボット1に第1指令信号が送信される。これにより、指定経路にしたがってロボット1を移動させることができる。一方、ユーザによる指定経路が安定移動要件を満たしていない場合、第1指令信号がリモコン2からロボット1に送信されない。このため、指定経路にしたがってロボット1を移動させること、ひいては、ロボット1が指定領域からはみ出たり、物体に接触したりする事態が回避される。
(もっと読む)
目標経路生成システム
【課題】ロボットの状態に鑑みて必要性の高いポイントを経由するようにこのロボットを移動させることができるシステムを提供する。
【解決手段】目標経路にしたがって自律的に移動するロボットRのための当該目標経路を生成するシステムは、リンク記憶手段211に記憶されているリンクを接続することによって、終点と始点とを結ぶ複数の移動候補経路を作成する候補経路作成手段110と、ロボットRの状態を認識する状態認識手段115〜118と、アクションポイント記憶手段212により記憶されているアクションポイントが含まれ、かつ、状態認識手段115〜118により認識されたロボットRの状態に鑑みて当該アクションポイントを経由する必要度が高いほどコストを低く評価する経路評価手段120とを備える。
(もっと読む)
ロボット
【課題】物体および自らが一定領域からはみ出さないように、この物体を動かしながら移動することができるロボットを提供する。
【解決手段】ロボットRおよび台車(物体)Wが通行領域に収まっているという「通行要件」が満たされていない場合、この通行要件が満たされるようにロボットRの行動計画が補正される。そして、ロボットRが補正後の行動計画にしたがって台車Wを動かしながら移動することにより、台車WおよびロボットRが通行領域からはみ出さないように、台車Wを動かしながら移動することができる。
(もっと読む)
ロボット、タスク実行システム
【課題】タスクの状態が変化した場合でもタスクの実行経済の観点から適切な状態においてタスクを実行することができるロボット等を提供する。
【解決手段】ロボットにおいて新規タスクを実行するために要する負荷または労力を表わすコストが評価され、このコストを表わすコスト情報がサポートサーバ200に送信される(入札手続)。さらに、サポートサーバ200においてコストが最低のロボットが指定され、指定されたロボットに対して当該新規タスクの実行指令が送信され、当該ロボットがこの実行指令にしたがって当該タスクを実行する(落札手続)。このようなタスクの入札および落札方式が採用されることにより、複数のロボットRのうち指定タスク実行経済に鑑みて適当なロボットRにより指定タスクが実行される。
(もっと読む)
行動決定装置、行動学習装置、及びロボット装置
【課題】入力情報から一つの情報空間に各々モジュール化した知能的判断システムを構築することができる行動学習装置及び方法、それによって生成された学習結果を使用した行動決定装置及び方法、これらの装置を搭載したロボット装置を提供すること。
【解決手段】ロボットは、外部からの指示情報から単語を抽出する知識取得部21と、抽出した単語によりネットワークを構築し、単語間の重みを更新するネットワーク構築部22と、単語の関係性をネットワーク上で重み付けした単語ネットワークに基づき、行動を決定する行動決定部23とを有する。
(もっと読む)
ロボット制御システム、ロボット、プログラム及び情報記憶媒体
【課題】ロボットを介したユーザ間の間接的なコミュニケーションを実現できるロボット制御システム、ロボット、プログラム及び情報記憶媒体を提供する。
【解決手段】ロボット制御システムは、ユーザの行動を計測する行動センサ、ユーザの状態を計測する状態センサ及びユーザの環境を計測する環境センサの少なくとも1つからのセンサ情報により得られるユーザ情報を取得するユーザ情報取得部と、取得されたユーザ情報に基づいてロボットがユーザに対して提示する提示情報の決定処理を行う提示情報決定部と、提示情報をユーザに対してロボットに提示させるための制御を行うロボット制御部とを含む。ユーザ情報取得部は、第2のユーザのユーザ情報である第2のユーザ情報を取得し、提示情報決定部は、取得された第2のユーザ情報に基づいて、第1のユーザへの提示情報の決定処理を行う。ロボット制御部は、第2のユーザ情報に基づき決定された提示情報を第1のユーザに提示するためのロボット制御を行う。
(もっと読む)
ロボット
【課題】様々な外的要因に柔軟に対応した動きを行うことができなかった。
【解決手段】(1)外的要因に応答して各々が独立に動くことが可能な複数の部位と、(2)(2a)外的要因を受けた時点から外的要因に対する複数の部位の動きが完了する時点までの処理を規定するプログラムと、(2b)複数の部位の各毎に、外的要因により特定される引数と、引数に対応する部位の動きとの関係を規定するテーブルとを記憶する第1の記憶部と、(3)外的要因に応じて変更可能な、複数の部位を動かす順序を規定するリストを記憶する第2の記憶部と、(4)外的要因が発生したとき、プログラムに従い、かつ、リストにより規定される、発生した外的要因により変更された複数の部位を動かす順序に従って、複数の部位の各々に、外的要因により特定される引数に対応する動きをさせる制御部と、を含む。
(もっと読む)
データ切り出し装置、データ切り出し方法及びデータ切り出しプログラム
【課題】ロボット装置を動かすためのモーションデータをコンテンツの特徴に合わせて容易に生成する。
【解決手段】楽曲データGDを解析してビート位置を検出するとともに、ビート位置により区切られる楽曲データGDの複数のビート区間Btそれぞれのビート区間特徴を得ると、このようにして得たビート区間Btそれぞれのビート区間特徴に応じて、モーションパーツデータをモーションデータMDから切り出し、この切り出したモーションパーツデータに対して、特徴解析情報TIDを付加するようにしたことにより、楽曲データGDの音楽区間毎の特徴に対応する特徴解析情報TIDを有するモーションパーツデータを選ばせることができ、かくして、ロボット装置11を動かすためのモーションデータMDを、楽曲データGDに基づく音楽の特徴に合わせて容易に生成することができる。
(もっと読む)
移動装置、ならびにその制御方法および制御プログラム
【課題】人間等の物体に挙動変化をより明確に認識させることにより、当該物体との接触を回避して移動しうる移動装置等を提供する。
【解決手段】ロボット1およびその挙動状態と物体xおよびその挙動状態とのそれぞれが、要素空間QSにおける基準空間要素Q0およびその挙動状態と第1空間要素Q1およびその挙動状態とのそれぞれとして認識される。当該認識結果に基づき、要素空間QSにおいて基準空間要素Q0が第1空間要素Q1に接触する可能性があると認識された場合、基準空間要素Q0と第1空間要素Q1との距離dに応じた角度θだけ前回の目標経路Rkに対して傾斜しているずらし経路rk+1が設定される。また、ずらし経路rk+1の終点r0を始点とし、基準空間要素Q0と第1空間要素Q1との接触を回避しうる経路が今回の目標経路Rk+1として設定される。
(もっと読む)
ロボット制御装置
【課題】 高齢者と好適なコミュニケーション(雑談型対話)ができるロボット制御装置を提供する。
【解決手段】 話題選択手段202が話題に適した時系列上の時点と現在の日時との関係を加味して発話記憶手段301に記憶された各話題毎の評価値を算出し、この評価値の大小に基いて話題選択手段202が発話記憶手段301から適切な話題を選択し、話題に対応した文章を発話記憶手段301から読み出して出力手段401に音声出力する。
(もっと読む)
ロボットによる物体を移動するサービスに必要な情報の取得方法と該方法を用いたロボットによる物体移動サービスシステム
【課題】家庭や空港ラウンジなど、任意エリアでロボットによる物体を移動するサービスに必要な情報を、確実に取得する方法とその方法を用いた物体移動サービスシステムを提供することが課題である。
【解決手段】サービス対象者からのサービス依頼内容を取得し、現在のサービスエリアに対応して依頼内容の実施に必要な確認項目をデータベースから取得して、前記確認項目に従がい、サービス依頼内容から必要情報の有無を確認した後、不足(無い)情報については情報取得に最適なデバイスを選択し、そのデバイスでサービス実施に不足する情報を取得してサービスを実施するようにした。
(もっと読む)
ロボットの制御方法
【課題】人間の居住環境や作業環境で十分に安心して使用できる汎用性の高いロボットを提供する。
【解決手段】自律制御型ロボットにおける動作の制御方法であって、自律制御型ロボットの動作により自律制御型ロボットが人間と接触するか否かを予測し(ステップS69)、人間と接触すると予測された場合に(ステップS69のYES)、人間の急所に自律制御型ロボットが接触しないように、自律制御型ロボットの動作を制限する(ステップS76)。
(もっと読む)
脚式ロボット、及びその制御方法
【課題】立脚状態を安定して維持することができる脚式ロボット、及びその制御方法を提供すること。
【解決手段】本発明の一態様にかかる脚式ロボットは、足首関節が設けられた脚部10と、脚部10に連結された胴体部50とを備える脚式ロボットであって、駆動信号に応じて足首関節を駆動するモータと、胴体部の状態量を計測するセンサ150と、センサ150からの出力に応じて、足首関節の目標トルクを算出する目標トルク算出部135と、目標トルクに対するリミット値が設定されたリミット値設定部136と、リミット値と目標トルクを比較して、目標トルクが前記リミット値を超えた場合にリミット値に応じた駆動信号をモータ142に出力する比較部137と、を備えるものである。
(もっと読む)
ロボットの制御方法、制御装置、制御プログラムおよび記録媒体
【課題】 ロボットが定型的に行う作業シーケンスを蓄積した作業データベースを構築できるようにする。
【解決手段】 作業シーケンスのデータベースから作業シーケンスを取得し(ステップ201)、前記作業シーケンスを上層から展開し(ステップ202)、対象物体固有の動作指令か否かを判別し(ステップ203)、対象物体固有の動作指令でなければ作業を実行し(ステップ206)、対象物体固有の動作指令であれば、対象物体ごとのデータベースから動作指令を取得し(ステップ204)、作業データを編集し(ステップ205)、作業を実行する(ステップ206)という手順で処理する。
(もっと読む)
1 - 20 / 43
[ Back to top ]