
Fターム[3C007WC09]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型のその他の特徴、構成 (746) | アブノーマルな状態からの復帰 (12)
Fターム[3C007WC09]の下位に属するFターム
転倒状態からの復帰 (7)
Fターム[3C007WC09]に分類される特許
1 - 5 / 5
2足歩行ロボット及びその制御方法
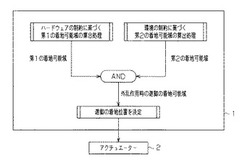
【課題】外乱の作用時に、ハードウェアや環境の制約に則った適切な遊脚の着地位置を設定する。
【解決手段】外乱作用時の遊脚の着地位置の決定に際して、電子制御ユニット1は、ハードウェアの制約により決定される遊脚の着地可能域を第1の着地可能域として算出するとともに、環境の制約により決定される遊脚の着地可能域を第2の着地可能域として算出する。そして電子制御ユニット1は、第1及び第2の着地可能域のAND領域を抽出し、その抽出したAND領域を、外乱が作用したときの遊脚の着地可能域として演算する。
(もっと読む)
ロボットおよび制御システム

【課題】任意形態の外乱に対して、制御対象の行動目的に鑑みて適当な形態で、当該制御対象を行動させることができる制御システム等を提供する。
【解決手段】周波数帯域の高低に応じて階層化されている複数のモジュールmodiのそれぞれが、自己モジュールが主担当する主目的を他のモジュールが主担当する副目的よりも優先させながら、主目的および副目的に適合するロボットRの行動形態の候補である行動候補を探索するように構成されている。低周波の第j+1モジュールにより探索されたロボットRの行動候補よりも、高周波の第jモジュールにより探索されたロボットRの行動候補を優先的に反映させた形でロボットRの行動が制御される。
(もっと読む)
ロボットおよび制御システム
【課題】任意形態の外乱に対して、制御対象の行動目的に鑑みて適当な形態で、当該制御対象を行動させることができる制御システム等を提供する。
【解決手段】周波数帯域の高低に応じて階層化されている複数のモジュールmodiのそれぞれが、自己モジュールが主担当する目的を他のモジュールが主担当する副目的よりも優先させながら、主目的および副目的に適合するロボットRの行動形態の候補である行動候補を探索するように構成されている。低周波の第j+1モジュールにより探索されたロボットRの行動候補よりも、高周波の第jモジュールにより探索されたロボットRの行動候補を優先的に反映させた形でロボットRの行動が制御される。
(もっと読む)
脚式移動ロボット
【課題】搭載するカメラ(撮像素子)に太陽光などの高輝度の光源が写り込まれるときも、撮影対象を適切な輝度値で撮影するようにした脚式移動ロボットを提供する。
【解決手段】撮像素子によって撮像された画像に高輝度の入射光によって撮像された高輝度撮像部位があるとき、ハンドを駆動して高輝度の入射光を遮断する(S18からS28)、頭部を回転させて高輝度の入射光を回避する(S36からS48)、あるいは脚部を駆動して回避することで、高輝度撮像部位の輝度を低減する輝度低減動作を実行する。
(もっと読む)
移動性能試験装置
【課題】試験装置の動作をロボットの動作に調和させながら当該ロボットの移動性能を試験しうる装置を提供する。
【解決手段】本発明の移動性能試験装置1によれば、ロボット動作計画に基づいてモータ動作計画が作成され、当該モータ動作計画にしたがってモータ12の動作が駆動される。これにより、エンドレスベルト11の駆動速度変化パターンが、当該エンドレスベルト11の上で移動性能が試験されているロボット2の移動速度変化パターンに応じて制御されうる。そして、エンドレスベルト11の動きのテンポがロボット2の動きのテンポに歩み寄るように、両者の動きのテンポの調和が図られ、この状態で当該ロボット2の移動性能が安定に試験されうる。
(もっと読む)
1 - 5 / 5
[ Back to top ]