
Fターム[3C042RA06]の内容
多工程加工の機械及びシステム (754) | 全体構成(システム構成) (211) | トランスファマシンタイプ (88) | ロータリ型 (19) | 工作物の向きを変更できるもの (5)
Fターム[3C042RA06]に分類される特許
1 - 5 / 5
生産システム
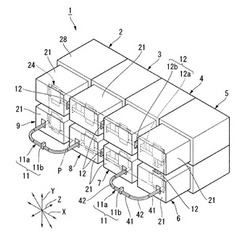
【課題】生産装置を並べ直すことなく、ワークに対する生産処理の順序の変更に対応可能な生産システムを提供する。
【解決手段】
ワークの生産処理を行う3つ以上の生産装置2〜9と、生産装置のうち、1つの生産装置と他の1つの生産装置に両端部が着脱可能に接続される搬送路11a、12aと、搬送路上を移動して、搬送路が接続された1つの生産装置から他の1つの生産装置にワークを搬送する搬送手段11b、12bと、を備える生産システム1であって、生産装置は、生産処理を行う処理部21と、処理部を内部に備え、略箱状に形成された装置基体28と、を有し、少なくとも1つの装置基体は、互いに交差する2方向X、Yで他の装置基体と接続されている。
(もっと読む)
工程間フレキシブル自動搬送システム

【課題】レイアウト変更の自由度を高めつつ低コストで実施可能な、被加工対象物を自動搬送するのに適した工程間フレキシブル自動搬送システムを提供する。
【解決手段】複数のマシニングセンタ10に対応して配置されるワークステーションキット100と、これらを連結するレールキット200と、レールキット間又はレールキットとワークステーションキット間に配置されるターンキット300と、レールキット又はワークステーションキットの何れかに連結されるワーク投入キット410と、レールキット又はワークステーションキットの何れかであってワーク投入キットとは別のレールキット又はワークステーションキットに連結されるワーク排出キット420と、互いに連結されたこれらのキット上を移動可能な複数のワーク搬送車とを有し、レールキットは、ワークステーションキット、ターンキット、ワーク投入キット、ワーク排出キットと着脱自在である。
(もっと読む)
複合加工機および複合加工機におけるワークの搬送方法
【課題】省スペースかつ省エネルギー型の複合加工機およびワークの搬送方法。
【解決手段】工具を着脱可能な主軸2を有する加工機MC1〜4を、ベッド10に対して案内手段11を介してワーク搬送方向にそれぞれ独立して往復移動可能に複数配設し、主軸2および加工機MC1〜4をそれぞれ独立して往復移動させるための駆動手段31、32,33と、工具を貯蔵するためのマガジン41,42と、を備えた複合加工機において、ワークWを載置するテーブル6と、主軸2に着脱可能に装着されワークWを搬送するマガジン42に貯蔵された搬送アーム5と、を備え、搬送アーム5を主軸2に装着して、駆動手段31、32,33により主軸2を搬送方向に移動してワークWを搬送する。
(もっと読む)
工作機械システム
【課題】コンパクトな構成で工作機械間のワーク搬送効率が高い工作機械システムを提供する。
【解決手段】工作機械システム10は、隣接して平行に設けられた第1工作機械11a及び第2工作機械11bと、コントローラ12と、ワーク移動装置14とを備える。第1工作機械11a及び第2工作機械11bは、鉛直平面内において360°回転する回転アーム32と、該回転アーム32に設けられた加工主軸36とを有する。ワーク移動装置14は、水平面で回転可能なターンテーブル150と、ターンテーブル150上で回転してワークWの加工面を加工主軸36に対向する向きに設定する3つの副回転機構152と、副回転機構152が120°間隔の第1保持位置154a、第2保持位置154b及び第3保持位置154cに配置されるようにターンテーブル150を間欠回転させる主回転機構156とを有する。
(もっと読む)
ロボット機構及び当該ロボット機構を含む装置
本発明は、ロボット機構及び当該ロボット機構を含む装置に関する。ロボット機構は、a)回転台と、b)回転台上に配置されて、加工すべき部品を固定し、位置付けし、且つその向きを定めるのに用いられるロボットのアセンブリと、c)回転台の周りに配置される加工装置のアセンブリとを備えることを特徴とする。 (もっと読む)
1 - 5 / 5
[ Back to top ]