
Fターム[3C048DD09]の内容
Fターム[3C048DD09]の下位に属するFターム
3摺動方向が互いに垂直 (107)
Fターム[3C048DD09]に分類される特許
1 - 15 / 15
加工装置
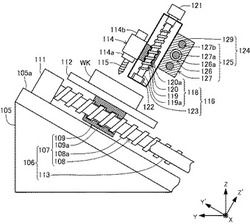
【課題】加工工具とワーク保持部とを位置決めする送りネジ機構における雄ネジと雌ネジとの接触面が摩耗した場合であっても両者の位置決め精度の低下を防止することができる加工装置を提供する。
【解決手段】加工装置100は、被加工物WKを保持するワーク保持部112を変位させる送りネジ機構107を備えるとともに、切削工具からなる加工工具115を保持する加工ヘッド114を変位させる送りネジ機構118を備えている。これらの送りネジ機構107,118は、雄ネジ108a,119aが形成されたネジ軸108,119と雌ネジ109a,120aが形成された可動体109,120とで構成されて鉛直方向に対して傾斜した状態で設けられている。このため、送りネジ機構107,118は、ネジ軸108,119における雄ネジ108a,119aの各山の上側のバックラッシが可動体109,120の自重により常にない状態で噛み合う。
(もっと読む)
工作機械

【課題】被加工物の曲面に対して、高精度に加工を行うことができる工作機械を提供する。
【解決手段】平坦な平面Waと湾曲した曲面Wbとを有するワークWを、平面Waが水平に配置された状態で固定して、曲面Wbに対して孔開け加工を行う工作機械であって、曲面Wbに対して孔開け加工を行う工具T1を回転可能に装着する下加工ヘッド25と、下加工ヘッド25を工具T1の軸方向に移動させる下サドル24と、平面Waに対して、曲面Wbの曲率に応じて設定された傾斜角度αで傾いて設けられ、下サドル24を傾斜角度αの傾斜方向に移動可能に支持する下クロスレール23とを備える。
(もっと読む)
加工装置および加工方法
【課題】軸対称形状,軸非対称形状,自由曲面形状、あるいは、それらの形状が複数アレイ上に配置された光学素子、またはそれらを成形するための成形型を高精度に加工可能にする。
【解決手段】所定の形状がアレイ状に配置された光学素子を加工する際、第1の回転軸1に被加工物9の中心を合わせて取り付け、第1の回転軸1の回転中心にないアレイ状に配置された一形状を第1の回転軸1を中心に回転する。この回転を、第1の回転軸1と対面する工具8を備えた第2の回転軸5を同回転数で同期回転させることによって、相殺して加工する。アレイ状に配置された形状の位置は、第1の回転軸(C1軸)に対する第2の回転軸5の回転開始角と、第2の回転軸(C2軸)5上にある直線軸X2軸6における半径方向の位置により決定する。
(もっと読む)
切削加工装置および切削加工方法
【課題】3次元的に広がりをもつ薄肉のワークに高精度かつ効率的に溝加工をおこなうことのできる切削加工装置と切削加工方法を提供する。
【解決手段】切削加工装置10は、X軸ガイド1に沿って移動する移動部2と、YZ面内を回動する回動部3と、スピンドル61とエンドミル62とからなる切削部6と、該切削部6を進退移動させるリニアガイド5、ソレノイド7、進退プレート42と、ワークの形状や加工パターンを記憶する記憶手段と、ワークを載置してY軸方向に移動させるテーブル8と、移動部2の移動制御と、回動部3の回動制御と、切削部6の進退制御と、テーブル8の移動制御のいずれか1つまたは複数の制御をおこない、切削部6の回転制御をおこなう制御手段と、から構成されている。この制御手段により、ワークWの加工面に対してエンドミル62が常に垂直に姿勢制御され、エンドミル62の移動量が制御される。
(もっと読む)
空間3自由度パラレル機構及び該空間3自由度パラレル機構を用いた多軸制御工作機械
【課題】簡易な機構で本質的に剛性が高く、可動体(主軸頭)の旋回角度可動範囲が広く、位置決めの絶対精度が本質的に高く、機構パラメータの校正が行い易くフィードバック制御性の良い空間3自由度パラレル機構を提供する。
【解決手段】主軸頭30を第1及び第2の可動サポート体23、25により、Z,A、B軸で移動自在に支承する。そして静止系に固定された3本の直線ガイド21上を移動する駆動スライダ33、33、33と主軸頭30を3本のロッド35、35、35で連結する。連結には球面ジョイント36、ユニバーサルジョイント37が用いられる。
(もっと読む)
加工装置
【課題】 駆動モータの数を減らすことにより低コスト化可能にする。
【解決手段】 ベース(11)と、被加工物(51)を保持する複数の保持部(70)を備えていてベースのベース面(12)上に配置された搬送部(60)と、ベース面上に配置されていて第一および第二の加工ヘッド(24、34)を備えた加工部(20)と、加工部を第一および第二の加工ヘッドと共にベース面に沿って摺動させる第一の駆動部(25)と、第一および第二の加工ヘッドをベース面に対してそれぞれ垂直に移動させる第二の駆動部(26、36)とを具備する加工装置が提供される。さらに、搬送部を回転させる第三の駆動部(65)を具備し、複数の保持部のそれぞれは搬送部の回転上面に設けられるようにしてもよい。
(もっと読む)
ステージ制御装置
【課題】 機構部がコンパクトでかつ調整操作が容易なステージ制御装置を提案する。
【解決手段】 基台上に3方向放射状に配設された3個の移動軸1と、該移動軸1上に位置調節自在に支持されるとともに上面が内側に傾斜した3個の傾斜テーブル2と、該傾斜テーブル2の上面に配設されるとともに前記移動軸1に対してそれぞれ斜交する角度で配設された3個の傾斜移動軸3と、該傾斜移動軸3上に軸方向滑動自在に支持された3個の支点保持テーブル4と、該支点保持テーブル4の上面に一端が連結された3個の球面ジョイント5と、前記3個の移動軸1の内側中心点の略上方に位置して前記3個の球面ジョイント5の他端が連結された1個のステージ6を備える。
(もっと読む)
平行運動機
個々に延長及び短縮できる少なくとも三つのセット装置を具備する平行運動機。各セット装置は、第一継手(8、9、10)を介して位置決めヘッドに連結される。各セット装置は、自在継手(3.1、3.2、3.3)を介して基部に連結される。位置決めヘッドは、セット装置の操作に応じて作業範囲内で移動できる。少なくとも二つの補強ビーム(5.1、5.2、5.2.1、5.2.2)は、各ビーム回転軸受(100.1、100.2)を介して位置決めヘッドに連結される。各補強ビームは、セット装置のうちの一つ以上が延長又は短縮されるとき、基部のビーム軸受(17.1、17.2、17.2.1、17.2.2)において横方向にスライドする。各ビーム軸受は、ビーム自在継手(BU1、BU2)を介して基部に連結される。少なくとも一つの補強ビームのビーム軸受は、補強ビームの縦軸線と平行な軸線周りに回転できる。  (もっと読む)
(もっと読む)
座標位置決め機械
【課題】簡略化された構造の座標位置決め機械を提供する。
【解決手段】剛的に連結されたテーブルおよび支持フレーム(314)を含む固定構造体を備えている。可動アーム(310)は3本の動力付入れ子式ストラット(316)によってフレームから懸架されている。ストラットの各々はアームおよびフレームの両者に全方位的に揺動自在に連結されている。結果として、可動アーム(310)は3つの回転自由度を持って動き得る。これらの自由度の各々を持つアームの動きはアームと固定構造体とに連結された受動拘束装置(340)によって拘束される。拘束装置(340)はアームの全ての回転運動を排除し、一方、同時にその並動を許容する。
(もっと読む)
工作機械
【課題】工作機械、特に、前向き及び上向きを指す傾斜した支持面8が形成される剛性基部1を備えるフライス・ボール盤を提供する。
【解決手段】支持面8は、被工作物支持体10用の支持体を形成するが、それは、中心軸15のまわりで回転可能であり、支持面8で支持された、中心軸15のまわりで回転可能である支持体を備える。支持体12の湾曲した支持部分13に、被工作物テーブル14が設けられ、その軸34は、支持面8の中心軸15と鋭角を成す。本発明によると、支持面8は、基部1の中心垂直面34に対して横方向に偏位して、その中心軸15が、基部1の中心垂直面32と鋭角を成し、被工作物テーブルが、回転可能な角度範囲内の中間位置で、前向きに傾いた体勢をとる。
(もっと読む)
5軸加工装置
【課題】 門型5軸加工装置の首振りヘッドの所定回転角度のを正確に設定することができるようにする。
【解決手段】 門型5軸加工装置のヘッドの下部20に回動軸21が装着され、回動軸21にローラギア22が固着され、このローラギア22のカムフォロワ23はクロボイダルカム26に係合され、又、回動軸21は下部ヘッド32に固着され、下部ヘッド32の二股部32aの下方に首振りヘッド33が回動軸34で回動自在に支持され、回動軸34に対向する首振りヘッド33の部分に固着された回動軸35は二股部32bに固着された軸受け36、37で回転自在に支持され、この軸受け36、37の間にカムフォロワ38を周囲に装着したローラギア39が装着され、ローラギア39のカムフォロワ38はクロボイダルカム40と係合されバックラッシュを除去する。
(もっと読む)
微小位置決め装置
【課題】真空雰囲気の劣化を防止しかつ位置決め精度が良好な微小位置決め装置を提供する。
【解決手段】位置決め対象部4と、位置決め対象部4を変位可能に支持する基部2,3と、位置決め対象部4と基部2,3との間に設けられ、温度変化に応じて伸縮する熱伸縮部10と、熱伸縮部10を加熱又は冷却する温度調節部11とを備える微小位置決め装置とし、熱伸縮部10を加熱又は伸縮したときの熱膨張又は熱収縮によって位置決めを行なう。
(もっと読む)
工作機械
【課題】 荷重のアンバランスや熱の局部的集中を避けることができ、加工精度を悪化させることがなく、しかも、安価な工作機械を提供する。
【解決手段】 工作機械は、ベッド11に前後動自在に支持されているテーブル12と、テーブル移動経路を挟んでその両側にそれぞれ立てられている左右一対のコラム13と、両コラム13に上下動自在に支持されているクロスレール14と、クロスレール14に左右動自在に支持されている主軸頭15とを備えている。両コラム13が、互いに一致させられたコラム前後方向中心線Lを有している。クロスレール14が、レール前後方向中心線Nを有している。コラム前後方向中心線Lおよびレール前後方向中心線Nを一致させた状態でクロスレール14が上下動させられるようになされている。
(もっと読む)
柔軟な軌道の位置付け機
柔軟な軌道の穴あけ機は、平坦でない加工物の表面に沿うために1方向で柔軟であり、かつ加工物の表面に平行な方向で実質的に硬いレールの対を用いる。レールは、各レールに沿って間隔を空けられた真空カップによって加工物に装着される。X軸運び台は、運び台に留められる柔軟なばねプレートに取付けられるローラによってレールにスライド可能に取付けられる。位置付けられるドリルまたはその他の装置は、X軸運び台にスライド可能に接続されるY軸運び台に取付けられる。加工物の三次元の表面は二次元の平坦なパターンに数学的に変換され、運び台の位置付けは平坦なパターンに基づいて制御される。  (もっと読む)
(もっと読む)
改良型自動リベッティングシステム
本発明は、1つの装置を用いて同じ作業点で、ボーリング、リーミング、リベット挿入、リベッティング、クリーニング等の複数の動作を行うことを可能にするためにロボット化設備で用いられるタイプの改良型自動リベッティングシステムに関する。本発明は、それ自体は動かずにパラレル運動機械上に固定されるマルチツールヘッドを用い、パラレル運動機械は、マルチツールヘッドの全ての位置決め移動を行って、ツールヘッドに設けられた個別のツールの異なる物理的位置間のオフセットに対し必要な補正を行うシステムを特徴とする。本発明の主要な利点は、システムが、複雑なツールヘッド変更機構の必要性をなくすことにより、ボーリング及び他の機能について異なる直径を得るようにし、それにより、上記装置のコストが大幅に削減されるとともに、その信頼性、精度、及び機械的寿命が高まることである。  (もっと読む)
(もっと読む)
1 - 15 / 15
[ Back to top ]