
Fターム[3D033CA15]の内容
パワーステアリング (3,056) | 電気式パワーステアリング (2,798) | 電動機などの制御のための検出 (1,457) | 操舵の状況 (760)
Fターム[3D033CA15]の下位に属するFターム
操舵力、操舵トルク、反力 (333)
ステアリング系の操舵角、操舵方向 (219)
車輪の操舵角、操舵量、操舵方向 (134)
操舵速度、操舵加速度 (70)
Fターム[3D033CA15]に分類される特許
1 - 4 / 4
車両用操舵装置
【課題】 過剰な冗長性を擁することなく、簡素な構成にて電子制御装置の異常時においても確実に操舵可能なステアバイワイヤ式の車両用操舵装置を提供すること。
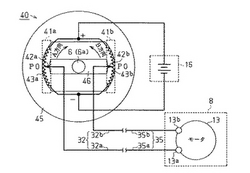
【解決手段】 ステアリング装置は、転舵ECUの異常時にモータ13に対する電力供給を通常供給系から非常供給系32に切り替える切替え装置と、非常供給系32の途中に設けられ、ステアリング操作に応じてモータ13の両給電端子13a,13b間の電位差を可変可能な電位差可変装置40とを備える。電位差可変装置40は、並列接続された一対の三端子型の可変抵抗器41a,41bを備え、該各可変抵抗器41a,41bの可動接点42a,42bは、モータ13の各給電端子13a,13bと接続される。そして、各可変抵抗器41a,41bは、その抵抗本体43a,43bに対する各可動接点42a,42bの接触位置がステアリング操作に応じて可変するように構成される。
(もっと読む)
車両挙動制御装置の調整方法

【課題】 車両ごとの運動性能の違いに合わせた制御パラメータを設定することを可能とした車両挙動制御装置の調整方法を提供する。
【解決手段】 工場出荷時等において、定常円旋回走行を行い(ステップS25)、その際の車両特性を測定し(ステップS26)、車両特性から制御パラメータであるスタビリティファクタKhを算出し(ステップS29)、マップ記憶部43に格納されているスタビリティファクタKhと比較して(ステップS30)、必要ならば格納されているスタビリティファクタKhを置き換える(ステップS31)。これにより、車両特性に合致した制御パラメータが得られる。
(もっと読む)
車両用動力操舵装置
【課題】電動式パワーステアリング装置を用いることなく、舵角比可変電動機の駆動による反力トルクがステアリングホイールに伝達されることを確実に低減する車両用動力操舵装置を提供する。
【解決手段】舵角比可変アクチュエータ3とステアリングホイール1との間に電動機などからなる反力低減アクチュエータ2を備える。さらに、舵角比可変アクチュエータ3が舵角比可変駆動により生じる反力トルクTrを算出する。そして、反力トルクTrに基づき、反力低減アクチュエータ2により反力トルクTrを低減させるトルク(反力低減トルク)Tdを算出する。そして、反力低減アクチュエータ2が反力低減トルクTdを出力するように制御される。
(もっと読む)
電動パワーステアリング装置
【課題】 センサー回路基板の軸方向の幅の短縮化を図り、二次衝突時のコラプスストロークを増大すること。
【解決手段】 トルクセンサーTSのセンサー回路基板10は、両面実装により構成してあることから、センサー回路基板10の軸方向の幅(Yb)を短縮化することができ(例えば、約半分)、トルク検出機構部の軸方向の幅(X)より短くして、二次衝突時のコラプスストローク(Lb)を増大することができる。また、衝撃吸収用ワイヤー20を選択的に装着することができる選択的装着部を具備していることから、同じ車両でありながら、簡単に衝撃吸収性能を変更して、全世界に共通なステアリングコラムで、簡単に各国の法規を満足することができ、しかも、製造コストの低減を図ることができる。
(もっと読む)
1 - 4 / 4
[ Back to top ]