
Fターム[3D044AA31]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・目的 (680) | 危険回避、安全性向上 (259) | 検出部の信頼性向上 (7)
Fターム[3D044AA31]に分類される特許
1 - 7 / 7
画像処理装置及びその方法
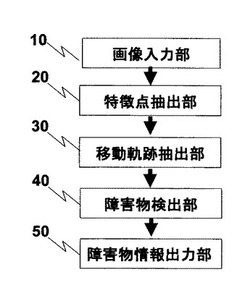
【目的】1台のTVカメラを用い、自車両進行情報前方に飛び出してくる危険な障害物を検出する画像処理装置を提供する。
【構成】画像入力部10では、移動体に取り付けられた1台のTVカメラから時系列画像を取得し、特徴点抽出部20では、原画像の中から障害物の接地位置に属している接地特徴点を抽出し、移動軌跡抽出部30では、接地特徴点の画像上での移動軌跡を抽出し、障害物検出部40では、抽出された移動軌跡の終点が消失点と移動軌跡の始点を結んだ直線よりも画像上で移動体の存在する方向に近い位置にある場合に接地特徴点が障害物に属すると判定する。
(もっと読む)
走行制御装置

【課題】 先行車のロストを適切に判定する。
【解決手段】 先行車を検出して車間距離を計測し、先行車との車間距離が目標車間距離となるように先行車追従制御を行うとともに、所定時間の間、先行車を検出できなかった場合に先行車を見失ったと判定し、先行車追従制御を解除する走行制御装置において、先行車を検出できなくなったときに先行車の見失い原因を推定し、先行車の見失い原因に応じて前記所定時間を変更する。
(もっと読む)
速度制御装置
【課題】 運転手の認識情報と視線情報を取得し、運転手の無意識の判断により車両の速度を的確な状態にすることのできる速度制御装置を提供する。
【解決手段】 運転手の脳波情報を取得する入力信号取得手段2と前記入力信号取得手段2より得られた入力信号をもとに、運転手20の脳波及びナビゲーションシステムのデータベースより自車位置の近辺に信号機があるかを検索し、近くの信号機の有無の判断結果から赤い信号機を認識したか否かを判断し、運転手の視線を取得する視線取得手段4と、前記視線取得手段4より得られた画像をもとに運転手の視線の向きから運転手が前方を見ている否かを判断し、速度を制御する速度制御判定手段14を設けることにより、車両の速度を的確な状態にする効果を有する速度制御装置を提供する。
(もっと読む)
車両用走行制御装置および送信波の照射制御方法
【課題】 先行車両との車間距離を正しく検出できる車両用走行制御装置および送信波の照射制御方法を提供する。
【解決手段】 路面からの反射光を先行車両とは誤認識しないように、路面からの反射光の影響を無視できる、路面からある一定の距離だけ離れた高さ位置をレーザ光下限高さとして設定する。先行車両200のリフレクタ201がレーザ光下限高さよりも低い位置にある場合には、先行車両200の後端部におけるレーザ光下限高さが基準照射方向となるように、コントローラ16が基準照射仰俯角を演算して車間距離センサ11に信号を出力する。車間距離センサ11は、コントローラ16からの信号に基づいて基準照射仰俯角を設定して、レーザ光により走査する。なお、先行車両200のリフレクタ201がレーザ光下限高さよりも高い位置にある場合には、レーザ光の基準照射方向は、先行車両200のリフレクタ201が存在する方向に設定される。
(もっと読む)
障害物検出装置
【課題】路面反射板や路面上方構造物を障害物として判断しない障害物検出装置を提供すること。
【解決手段】先行車両検出装置13において、上方照射波30と下方照射波31とは一部重なり合いを生じるように照射波を照射して、上方照射波30と下方照射波31とのそれぞれの反射波強度から照射波が反射した物体の種類を判定するようにした。
(もっと読む)
車両用運転支援装置
【課題】 先行車の捕捉が不安定となった際に、適切なタイミングで走行制御を中断することのできる車両用運転支援装置を提供する。
【解決手段】 PCU6は、車外環境の悪化等によってIPU5による立体物の継続的な認識時間が短くなり先行車の捕捉とロストが頻繁に繰り返されている場合には、判定用カウンタCt1にカウンタ値を加算し、先行車が継続的に捕捉されている場合、或いは、先行車が継続的にロストされている場合にはクリアカウンタCt0の作用によって判定用カウンタCt1からカウンタ値を周期的に減算する。これにより、先行車の捕捉状態に応じて判定用カウンタCt1を適切に増減させることができ、この判定用カウンタCt1の計数値が第1の閾値に達してから少なくとも第2の閾値以下となるまでの間、走行制御のHALTを判定することにより、適切なタイミングでの走行制御の中断が可能となる。
(もっと読む)
車両の減速制御装置
【課題】前方車両との位置関係を適正にするために変速機と制動装置を協調して制御することで減速度を発生させる場合に、前方車両のロスト時に生じる違和感を抑制することが可能な車両の減速制御装置を提供する。
【解決手段】車両X1と前記車両の前方の前方車両X2との位置関係を適正にするために変速機10と制動装置200を協調して制御することで減速度を発生させる車両の減速制御装置であって、前記前方車両を見失う可能性が有ると判定されたときには、前記変速機により発生させる減速度の割合を増やす。前記前方車両を見失う可能性の有無は、前記車両と前記前方車両との距離Lb’と、前記車両の前方のカーブの曲率又は半径Rに基づいて、判定されることができる。また、前記前方車両を見失う可能性の有無は、道路勾配に基づいて、判定されることができる。
(もっと読む)
1 - 7 / 7
[ Back to top ]