
Fターム[3D044AE27]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・制御部の特徴 (590) | 信号の処理、手段 (524) | フィードフォワード制御 (5)
Fターム[3D044AE27]に分類される特許
1 - 5 / 5
車両用走行制御装置
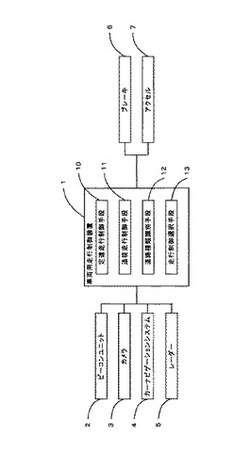
【課題】自車が走行する道路の種類に基づいて最適な走行制御手段を実行させる車両用走行制御装置を提供することを目的とする。
【解決手段】車両を設定速度で走行させる定速走行制御手段10と車両を設定車間距離で走行させる追従走行制御手段11とを有する車両用走行制御装置1は、車両位置における道路の種類を識別する道路種類識別手段12と、道路種類識別手段12により識別された道路の種類に基づいて、実行する走行制御手段を選択する走行制御選択手段13とを備える。
(もっと読む)
車両の駆動力制御装置

【課題】 先行車との車間距離に応じて変速比をダウンシフトする制御において、アクセルオフの状態では減速度が過大となり、車間距離が無用に大きくなり、または以後の加速応答が悪化する。
【解決手段】 先行車の加速状態または車間距離等を検出する車間距離センサを設け、自車が減速中かつ先行車が加速中であることを検出したときには、変速機の目標変速比をダウンシフト側に補正するのみならず、エンジンの目標出力をアイドルよりも増大側に補正する。これによりアクセルオフ時の減速度を抑制して車間距離の急拡大を回避すとともに、この状態からの加速応答を改善する。
(もっと読む)
車両の走行安全装置
【課題】 進行方向および通過中のカーブに対して適切に安全装置を作動させる。
【解決手段】 作動部64は、安全装置の作動時に運転意志検出部65にて運転者の加速意志が検出されないときには安全装置を作動させる所定期間を延長し、さらに、所定期間を延長している状態で運転意志検出部65により加速意志が検出されたときには所定期間を延長することを終了する。作動部64は、安全装置の作動時にヨーレートまたは横加速度の少なくとも何れかが増加傾向に変化することが検出されたときには安全装置を作動させる所定期間を延長し、さらに、所定期間を延長している状態でヨーレートまたは横加速度が増加傾向に変化しないことが検出されたときには所定期間を延長することを終了する。
(もっと読む)
車両用走行制御装置
【課題】 運転者の運転負荷を軽減する車両用走行制御装置を提供すること。
【解決手段】 車両において操作ペダル(例えば、アクセルペダル)の操作反力の大きさを制御する車両用走行制御装置であって、車両に作用する外力を推定又は検出する外力推定/検出手段と、上記外力推定/検出手段により推定又は検出された外力の大きさに基づいて上記操作ペダルのペダル反力特性を制御するペダル反力特性制御手段とを備える。外力推定/検出手段が車体と運転者との相対的な位置関係を変動させる走行環境(例えば路面状態)の変化を外力として推定又は検出し、ペダル反力特性制御手段は、外力推定/検出手段により推定又は検出された外力の大きさが大きくなるほど操作ペダルのペダル開度に対するペダル反力の増加勾配が大きくなるようにペダル反力特性を制御する。
(もっと読む)
車両の減速制御装置
【課題】前方車両との位置関係を適正にするために変速機と制動装置を協調して制御することで減速度を発生させる場合に、前方車両のロスト時に生じる違和感を抑制することが可能な車両の減速制御装置を提供する。
【解決手段】車両X1と前記車両の前方の前方車両X2との位置関係を適正にするために変速機10と制動装置200を協調して制御することで減速度を発生させる車両の減速制御装置であって、前記前方車両を見失う可能性が有ると判定されたときには、前記変速機により発生させる減速度の割合を増やす。前記前方車両を見失う可能性の有無は、前記車両と前記前方車両との距離Lb’と、前記車両の前方のカーブの曲率又は半径Rに基づいて、判定されることができる。また、前記前方車両を見失う可能性の有無は、道路勾配に基づいて、判定されることができる。
(もっと読む)
1 - 5 / 5
[ Back to top ]