
Fターム[3D046HH30]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 車体状態 (2,543) | 特殊車の作業状態 (2)
Fターム[3D046HH30]に分類される特許
1 - 2 / 2
車載情報端末、自動車の走行制御システム、自動車の走行制御装置及び方法
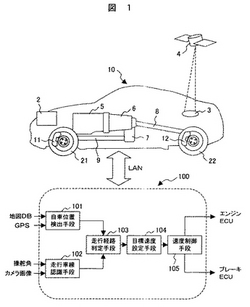
【課題】走行経路に応じて設定された目標速度に応じて自車の速度を制御するためには、走行経路の判定精度を向上させる必要がある。
【解決手段】地図情報に応じて自車位置の検出または推定を行い、画像情報と自車の操舵角に応じて自車の走行車線を認識し、検出または推定された自車位置と認識された走行車線に応じて走行経路を判定する。例えば、画像情報と自車の速度微分値に応じて自車近傍の道路勾配を認識し、検出または推定された自車位置と認識された道路勾配に応じて走行経路を判定する。あるいは、画像情報ないしインフラストラクチャから受信した信号に応じて自車前方の料金収受装置の種類を認識し、検出または推定された自車位置と認識された料金収受装置の種類に応じて走行経路を判定する。判定された走行経路に応じて自車の目標速度を設定し、設定された目標速度に応じて自車の速度を制御する。
(もっと読む)
車線逸脱防止装置

【課題】 高応答での車線逸脱防止を達成しながら、車線逸脱という状況下において、走行安全性を向上できると共に運転者への認知性も向上できる車線逸脱防止装置を提供すること。
【解決手段】 自車両が走行車線から逸脱しそうになることを判断する逸脱判断手段と、該逸脱判断手段により自車両が走行車線から逸脱しそうであることが判断された場合には、逸脱を回避する方向のヨーモーメントを左右輪の制動力差により発生させる制駆動力制御手段とを備えている。
(もっと読む)
1 - 2 / 2
[ Back to top ]