
Fターム[3D233CA13]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 電動機などの制御のための検出 (13,688) | 車両の運動状況 (4,070) | 車両の速度 (3,122)
Fターム[3D233CA13]に分類される特許
3,121 - 3,122 / 3,122
重畳ステアリング装置を備えた車両のステアリング方法
重畳ステアリングシステムを備えた車両のステアリング方法であって、ドライバーによって与えられるステアリング角及び追加の角度(付加ステアリング角)を算出するとともに、その結果として得られるステアリング角を設定するために、この与えられたステアリング角に対して、重畳アクチュエーターを用いて、特に電動モーターを用いて、かつ重畳伝動装置を介して、別の値、特に走行動特性に関する値に応じて、この付加ステアリング角を重畳することが可能である方法において、このステアリングシステムの結果として得られるステアリング角にもとづき、並びにこの付加ステアリング角に直接的に依存する、或いはこの付加ステアリング角を表す値にもとづき、この重畳伝動装置の伝動装置入力角
【数1】
(53)に関する値を算出することを特徴とする方法。  (もっと読む)
(もっと読む)
増分測定および車輪の差速の測定によるステアリングホイールの絶対角位置の決定
自動車のシャーシに対してその自動車のステアリングホイール(1)の絶対角位置θを決定するためのシステムは、ステアリングホイールの相対角位置δをインクリメンタルに測定するための装置と、同一軸に取り付けられた車輪の差速ΔV/Vを測定するための装置(2)と、期間tにおいて角位置と差速をサンプリングするための処理装置(8)を備える。前記装置は、tn瞬間毎に、差速ΔV/Vに従う絶対角位置θ(tn)の推定値θ*(tn)と、角位置θ*(tn)とδ(ti)の間の平均差変位(tn)を決定するのに適した演算手段を備える。ここでiは0からnまでの範囲の変数であり、絶対角位置θ(tn)は平均差変位(tn)と角位置δ(tn)の和である。 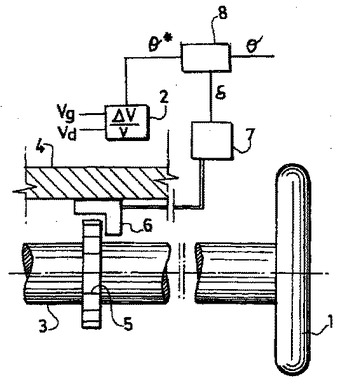 (もっと読む)
(もっと読む)
3,121 - 3,122 / 3,122
[ Back to top ]