
Fターム[3D235GB37]の内容
車両の推進装置の配置又は取付け (28,655) | 車輪内又は車輪に隣接する推進用モータの配置(インホイールモータの配置、支持) (1,587) | モータ以外の特徴ある装置 (1,579) | 車輪、ホイール (243) | クローラ式 (6)
Fターム[3D235GB37]に分類される特許
1 - 6 / 6
無人走行用移動体
【課題】被災地の調査に適した無人走行用の移動体を開発する。
【解決手段】機体2と該機体2を覆う走行用クローラ5から構成される無人走行用の移動体であって、機体2は、内部に移動体制御用の中央収納部21を有し、機体2の下面はクローラベルト53の摺接面を形成し、機体2の前後にはプーリ7が設けられており、走行用クローラ5は、機体2の前後に設けたプーリ7間にクローラベルト53が掛け回され、電動モータ9を駆動源とする無人走行用の移動体。
(もっと読む)
無人走行用移動体

【課題】被災地の調査に適した無人走行用の移動体を開発する。
【解決手段】機体2と該機体2を覆う走行用クローラ5から構成される無人走行用の移動体であって、機体2は、内部に移動体制御用の中央収納部21を有し、機体2の下面はクローラベルト53の摺接面を形成し、機体2の前後にはプーリ7が設けられており、走行用クローラ5は、機体2の前後に設けたプーリ7間にクローラベルト53が掛け回され、電動モータ9を駆動源とする無人走行用の移動体。
(もっと読む)
無人走行用移動体
【課題】被災地の調査に適した無人走行用の移動体を開発する。
【解決手段】機体2と該機体2を覆う走行用クローラ5から構成される無人走行用の移動体であって、機体2は、内部に移動体制御用の中央収納部21を有し、機体2の下面はクローラベルト53の摺接面を形成し、機体2の前後にはプーリ7が設けられており、走行用クローラ5は、機体2の前後に設けたプーリ7間にクローラベルト53が掛け回され、電動モータ9を駆動源とする無人走行用の移動体。
(もっと読む)
無人走行用移動体
【課題】被災地の調査に適した無人走行用の移動体を開発する。
【解決手段】機体2と該機体2を覆う走行用クローラ5から構成される無人走行用の移動体であって、機体2は、内部に移動体制御用の中央収納部21を有し、機体2の下面はクローラベルト53の摺接面を形成し、機体2の前後にはプーリ7が設けられており、走行用クローラ5は、機体2の前後に設けたプーリ7間にクローラベルト53が掛け回され、電動モータ9を駆動源とする無人走行用の移動体。
(もっと読む)
ハイブリッド建設機械
【課題】下部走行体(A)と、該下部走行体(A)に対して旋回自在に支持される上部旋回体(B)と、動力源としてのエンジン(2)と、該エンジン(2)により駆動される交流発電機(45)とを有するハイブリッドショベル(1)において、上部旋回体(B)の重量増加を抑制しつつ、後方小旋回要求と姿勢バランス要求との双方を満足させる。
【解決手段】少なくともエンジン(2)及び交流発電機(45)を下部走行体(A)に配設するようにする。
(もっと読む)
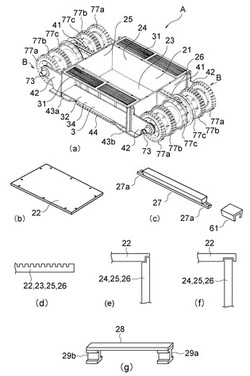
バッテリ駆動式建設機械のバッテリ保持構造
【課題】複数のバッテリを効率よく搭載することができるバッテリ駆動式建設機械のバッテリ保持構造の提供。
【解決手段】シリンダ34a〜34cと、駆動用バッテリ241と、インバータ231a〜231eと、電動モータ271,274,281,431L等とを有するバッテリ駆動式建設機械のバッテリ保持構造において、駆動用バッテリ241を複数収納可能な筐体5と、この筐体5を複数段積層可能に収納する架台6と、この架台6に筐体5を固定可能なストッパシャフト7とを備え、筐体5が支柱51の上端に凸型ホルダ52を有し、下端に凹型ホルダ53を有し、架台6が底板62に筐体5の凹型ホルダ23が係合可能な凸型ホルダ63を有する構成にしてある。
(もっと読む)
1 - 6 / 6
[ Back to top ]