
Fターム[3D246HA13]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 操舵状態 (1,157) | 運転者の操舵状態 (1,067) | ハンドル舵角 (864)
Fターム[3D246HA13]に分類される特許
861 - 864 / 864
車両を安定させるための装置及び方法
本発明は車両の横方向の運動を表す、横方向の運動変数の実際値を決定するために備えられた検出装置(10)を含み、横方向の運動変数のための目標値を決定し、横方向の運動の目標値が決定されたしきい値を超えた場合に、所定の安定条件に従って該決定されたしきい値を定義する評価ユニット(11)を含む、車両を安定させるための装置及び方法に関する。該評価ユニット(11)は決定された実際値と、横方向の運動変数に対する決定され場合によっては制限される目標値との比較に応じて、車両の運転安定性が増加するような方法で、車両の長手方向及び/又は横方向の運動に影響を与えるために設けられた車両のユニット(12)を作動させる。横方向の運動変数は車両の傾き角を表す傾き角変数、及び/又は車両の車輪に生じるスリップ角を表すスリップ角変数を有する。  (もっと読む)
(もっと読む)
協調型トラクション制御システム
個々の車輪の空転及び/又は横滑りを個別に制御する協調型トラクション制御システムである。該システムは、特定の車軸に備えられた所定の車輪に掛かる駆動トルクの量を調節できる駆動トルクアクチュエータに接続されている既存のトラクション及び挙動安定化モジュールを使用している。このシステムは、空転及び/又は横滑りしている車輪の駆動トルクの制御を行うか、或いは、ブレーキを作動させてスロットル角度を調節するとともに該駆動トルクの制御を行って、車輪の空転及び/又は横滑り及び/又は車両の動作を低減又は制御する。 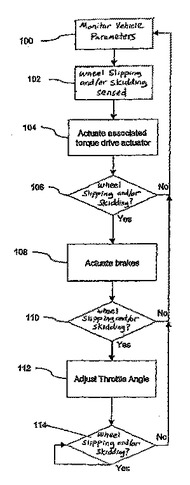 (もっと読む)
(もっと読む)
車両転覆軽減の方法および装置
車両の転覆事象を検出する方法を提供する。車両の横運動エネルギが、車両縦速度および車両横滑り角に応答して判定される。車両の横加速度が、測定される。タイヤ垂直力が、測定される。転覆潜在力インデックスが、横運動エネルギおよび横加速度に応答して判定される。転覆インデックスが、横加速度の要因およびタイヤ垂直力の要因によって転覆潜在力インデックスに重みを付けることによって判定される。比較を行って、転覆インデックスが所定の閾値を超えるかどうかを判定する。 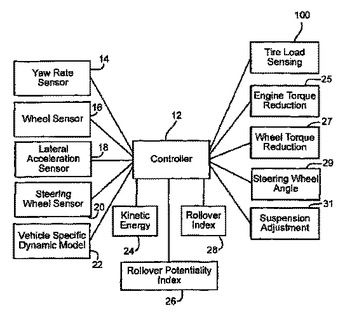 (もっと読む)
(もっと読む)
車両の走行推進力の制御方法、その方法を実施する装置とその用途
【課題】
車両の走行状態を任意の走行操縦にて所望状態に適合させること。
【解決手段】
この発明は、走行状態値の運転者指示値に対応する目標値(Ψ’ref )が走行状態値の検出された実際値(Ψ’)と比較されて、動揺モーメント分布が検出されて変更される車両の走行推進力を制御する方法に関する。この方法は、a.走行状態値の目標値(Ψ’ref )と走行状態値の実際値(Ψ’)との比較に基づいて車両の走行状態が決定され、b.所定の走行状態に依存して、予定走行状態に対応する新たな動揺モーメント分布が決定され、c.その新たな動揺モーメント分布が調整されることを実施される。さらに、この発明は、車両の前後車軸において動揺モーメント支持手段と車両の少なくとも一つの走行状態値(Ψ’)を検出するセンサーとを含む車両の走行推進力を制御する装置に関する。この装置は好ましくはヨーモーメントを補償するシステム(ESP)に使用され得る。  (もっと読む)
(もっと読む)
861 - 864 / 864
[ Back to top ]