
Fターム[3F333AE21]の内容
フォークリフトと高所作業車 (11,384) | 荷係合要素 (662) | クランプ (56)
Fターム[3F333AE21]の下位に属するFターム
摺動開閉クランプ (10)
揺動開閉クランプ (20)
分離アーム
吊下げ式 (3)
間知ブロック吊クランプ
ドラム缶リブクランプ (4)
スピンターンアタッチメント
クランプ型ロードスタビライザ (6)
Fターム[3F333AE21]に分類される特許
1 - 13 / 13
クランプアタッチメントおよびクランプリフト
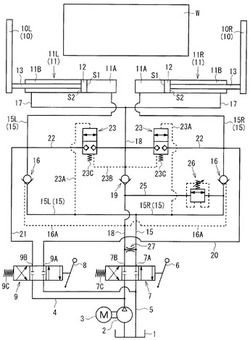
【課題】クランプアームのサイドシフト可能で、かつ、クランプアームを開くときに増速可能であるクランプアタッチメントの提供。
【解決手段】一対のクランプシリンダ11R、11Lのボトム室11Aと繋がる第一油路15R、15Lには、パイロット操作型チェックバルブ16を設ける。ロッド室11Bと繋がる第二油路17は、開閉切換バルブ7に繋がる第三油路18が接続される。第三油路18にはチェックバルブ19が設けられる。第一油路15と第三油路18を繋ぐ第四油路22には、一対のパイロット操作型切換バルブ23を設ける。パイロット操作型切換バルブ23には、切換えパイロット管路23Aから第一油路15の作動油圧力を切換えパイロット圧として付加する。これにより、サイドシフト可能なクランプアーム10を開くときに、差動回路を形成し、クランプアーム10を開く動作を高速で行うことができる。
(もっと読む)
搬送車両

【課題】高い走行安定性の搬送車両を提供すること。
【解決手段】クランプリフト1の前輪10および後輪6には、前輪10および後輪6に加わる荷重を検出する荷重検出器が設けられている。クランプリフト1がワークWをクランプした後で、制御装置4は前輪10および後輪6に加わる荷重を検出し、各車輪における走行抵抗が等しくなるよう目標荷重N1、N2を算出する。そして、マスト16を前後に傾けクランプブラケット25をマスト16に沿って昇降させる。そして、クランプブラケット25をマスト16に対し左右に移動させる。これによりワークWを前後左右に移動させて各車輪に加わる荷重を目標荷重N1、N2に調節して各車輪の走行抵抗を等しくしてクランプリフト1の走行安定性を向上させる。
(もっと読む)
物品移載装置
【課題】把持する物品に過大な把持力が作用することを防止して、長期にわたり精度よく物品を把持可能な物品移載装置を提供する。
【解決手段】略水平方向に移動可能に立設されたマストと、マストに沿って昇降可能に支持された昇降台6と、昇降台6を昇降させる昇降装置と、昇降台6に設けられ、並設する格納庫のラックとの対向方向に伸縮自在で、且つ対向方向に直交する水平方向に移動して物品Wを把持する一対のフォーク10とを備える物品移載装置において、一対のフォーク10を水平移動させるための第1電動機11dの電流値を制御して、物品Wを把持する把持力を制御する制御手段14が設けられている。
(もっと読む)
搬送車両
【課題】ワークが載置された棚の脚などに搬送車両が干渉せずにワークをクランプ自在な搬送車両を提供するとともに、車輪に過度の負担を与えない搬送車両を提供すること。
【解決手段】クランプリフト1は、車体10の前面下部から前方に延出する脚部20を備える。脚部20は、モータ26、ラック20Aおよびピニオン27により、車体10の脚部収容部10Aに進退自在に設けられる。脚部20の先端部には、前輪21とセンサ30を備える。クランプリフト1でワークWを荷役するときに、センサ30が台Sまでの距離を測定し、脚部20が台Sに干渉する場合、脚部20を台Sと干渉しないよう脚部収容部10A内へ収容する。
(もっと読む)
把持装置
【課題】ワークを変形させず把持できる把持装置の提供にある。
【解決手段】把持装置は、一対のアーム21に一対の把持プレートをリンクバーを介して支持している。把持プレートには、ワークWに当接する把持面に感圧センサ24を設ける。また、一対のアーム21のアーム間距離を変更させるモータ15には、モータ15の回転軸の回転量を検出するエンコーダを設ける。ワークWを把持するときは、一対の把持プレートがワークWに当接したかを感圧センサ24にて検出する。一対の把持プレートがワークWに当接したら、把持プレートがリンクバーにより上方の最大揺動位置まで揺動するようモータ15を所定量駆動する。把持プレートが最大揺動位置に達したときに、モータ15の駆動を停止して把持操作を完了する。
(もっと読む)
把持装置
【課題】多様なワークの載置状況に対応できる把持装置の提供にある。
【解決手段】クランプリフト1は、マスト14の前面に昇降するブラケット15を有する。ブラケット15には、支持軸部材16に回転可能に一対のシリンダ17が設けられる。シリンダ17には、ロッド18が進退可能に設けられる。ロッド18の先端には、回転軸部材19を備えており、把持装置20の回転部材21および把持プレート22が回転軸部材19を介して回転自在に支持される。一対の把持プレート22は、リンクバーを介して回転部材21に揺動可能に支持される。回転軸部材19は、回転部材21の重心位置Gより上方で回転部材21に連結されるため、シリンダ17が何れの角度に傾いても回転部材21はその姿勢を維持できる。また、把持プレート22は、回転部材21に対して常に上下方向に揺動するため、ワークWを把持すると同時にワークWを上方へ持上げることができる。
(もっと読む)
把持装置
【課題】ワークの重量や強度に応じて把持状態を把握できる把持装置の提供にある。
【解決手段】把持装置は、一対のアーム21に一対の把持プレート22をリンクバー35を介して支持している。アーム21には、リンクバー35の回転角度θを検出するポテンショメータ40を設ける。また、一対のアーム21の間隔を変更するモータ15には、モータ15の回転軸の回転量を検出するエンコーダを設ける。ポテンショメータの検出値およびエンコーダの検出値からワークWの把持状態を判断する。さらにエンコーダの検出値からアーム21の移動量を求めるとともに、ポテンショメータ40の検出値から把持プレート22の移動量を求める。移動量に対する移動量の比が所定値以下になったときにモータ15の駆動を停止する。
(もっと読む)
油圧クランプ力の均等化制御
フリーリフトマストを有する積荷リフトシステムの積荷クランプ部材を自動重量応答制御するのに適している油圧弁回路を提供する。積荷リフトシステムは、概して、積荷に把持力を与えるための1つ以上の流体動力アクチュエータ(101,103)と、フリーリフトの可動域および少なくとも1つのメインリフトの可動域を有する少なくとも1つの細長で縦方向に伸長可能な流体動力リフト装置(154,156)と、手動操作式の積荷クランプセレクタ弁および積荷リフトセレクタ弁(134,146)と、を含んで構成される。油圧弁回路は、独立して、積荷をリフトする際の積荷クランプ部材の重量応答制御を行い、積荷クランプセレクタ弁または積荷リフトセレクタ弁を同時に手動操作することなく積荷クランプ部材を常時自動重量応答動力制御し、検知された積荷重量を均等化することによって、検知された積荷の重量がリフト装置の縦方向に伸長可能な位置にほぼ無関係となるようにする。 (もっと読む)
ダメージコントロールオーバライド付きハイドロリック弁回路
双方向ハイドロリックパワー装置(308,310)のアセンブリが、互いに近づく閉口運動、互いに離れる開口運動又は互いに一斉にサイドシフトする運動において、フォーク又はクランプアームなどのそれぞれのクランプ部材を選択的に移動させることができるそれぞれの最大ハイドロリック圧力を可変的に制限し、クランプ部材の制御に対してダメージコントロールをもたらすことができるハイドロリック弁回路である。この弁回路は、前記パワー装置のアセンブリと相互連結され、最大圧力の選択に応答して、前記アセンブリが前記サイドシフト運動を生じさせることができる最大サイドシフト圧力を可変的に制限し得る一つ以上の圧力調整弁(200,202,204)を含むのが好ましい。この弁回路は、前記クランプ部材の前記開口運動に応答して、前記最大圧力の選択をオーバライドし、前記最大サイドシフト圧力を自動的に低下させることができる少なくとも一つのオーバライドアセンブリ(220)を含むのが好ましい。  (もっと読む)
(もっと読む)
フォークリフト
【課題】不定形な荷物や複数の荷物の荷役運搬作業を容易に行うことができるフォークリフトを提供する。
【解決手段】フォークリフト1は、荷物を積載可能に形成されたフォーク31,31と、上下方向に延び、フォーク31,31を上下方向にスライド可能に支持するマスト32,32と、フォーク31,31をマスト32,32に沿って昇降させる昇降用駆動装置と、を有している。また、フォークリフト1は、少なくとも荷物を把持可能に構成されたアーム41,41を備えている。
(もっと読む)
動作シリンダーを位置決めするためのシステム、そのシステムの使用および機械
動作シリンダー(1)のための位置決めシステムにおいて、バルブまたは一組のバルブ(6;10、11)は、ポンプシリンダー(7)のポンプ流体室(8)からこの動作シリンダー(1)の動作流体室(2)への油圧油の自由な供給を許容するための手段、制御側(A)の油圧油の圧力が所定の圧力限界を超えて上昇したときのこの動作流体室(2)からこのポンプ流体室(8)への油圧油の逆流を防止するための手段、および制御側(A)の油圧油の圧力がその所定の圧力限界よりも低くなったときの動作流体室(2)からポンプ流体室(8)への油圧油の自由な逆流を許容するための手段を備える。動作ピストンロッド(3)はポンプピストンロッド(9)の動きに密接に従い、バルブまたは一組のバルブ(6;10、11)は圧力変動が動作側(B)から制御側(A)へ伝わることを防止する。このシステムは、例えば回転刃式剥皮機(16)において、樹皮を剥ぐ刃(17)の動作シリンダーを位置決めするために使用することができる。このシステムはまた、機械の油圧式把持部(18)の把持する爪(19)を動作させる動作シリンダー(1)を位置決めするために使用することもできる。さらに、このシステムは機械のプッシャーシャフト、リフトブームおよび連結式のナックルブームの動作シリンダーを位置決めするために好適に使用することができる。 (もっと読む)
穀粒袋秤量台
【課題】穀粒袋を受けて秤量する穀粒袋秤量台は、籾摺機や、選別機から取出される穀粒を受けて収容しながら秤量するもので、単独形態として移動取扱することが多く、持ち運びに便利であるように小形軽量であることを要する。秤量台上に袋低を支持する支持ローラや、この袋口部を保持する袋ホルダ等を設ける形態では、この重量が増やして取扱し難いものとなり易い。
【解決手段】適宜高さの外周縁1を形成して秤量器2上面に被せる板金製の支持板3の上面に、袋4底支持ローラ5のローラ軸6端部を支持する支持穴7を有して門形状断面に板金成形した軸支持板8を取付けると共に、この袋4口部を保持する袋ホルダ9を着脱可能に取付けたことを特徴とする穀粒袋秤量台の構成とする。
(もっと読む)
汎用把持装置および保持装置
本発明は、あらゆる種類の物体の把持、保持、持上げおよび/または移動のためのアセンブリであって、変形可能でかつ物体に適合可能な表面(2)を有する少なくとも1つの容器(1)を備えており、容器内部には、温度、負圧、真空、過圧の影響下で固化可能な物質(3)を含み、さらに、温度および/または圧力の影響を及ぼすための少なくとも1つの装置を備えている、アセンブリに関する。また、本発明は、あらゆる種類の物体の把持、保持、持上げおよび/または移動のための方法であって、前記のような容器(1)を物体と接触させ、続いて、形状嵌合が達成されるまで温度変化および/または圧力変化に曝す、方法に関する。  (もっと読む)
(もっと読む)
1 - 13 / 13
[ Back to top ]