
Fターム[4F035CB23]の内容
Fターム[4F035CB23]に分類される特許
1 - 4 / 4
加工システム及び加工方法
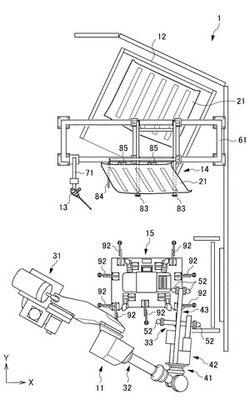
【課題】自動車の生産工程のうちルーフ工程の省スペース化や作業の効率化を図ること。
【解決手段】ハンドジグ付ロボット11は、ワーク21をパネルストック12から取り出す。ハンドジグ付ロボット11は、ワーク21を固定シーリングガン13に対して相対的に移動させる。これにより、固定シーリングガン13から噴出されるシーラが、ワーク21に塗布される。ハンドジグ付ロボット11は、ワーク21をシーラ用位置決め治具14に固定する。ハンドジグ付ロボット11は、ワーク21を溶接用位置決め治具15に固定させ、ワーク21に対してスポット溶接を行う。ハンドジグ付ロボット11は、ワーク21を払出し場所(図示せず)に払い出す。
(もっと読む)
塗装装置及び巻込鋼管内面塗装方法

【課題】管の周方向の一部に塗料が塗布されない領域を形成する塗装装置を提供することを課題としている。
【解決手段】管の内周面に塗料を塗布する装置であって、塗料を該管Pの内周面に向け塗布するノズル11と、該ノズル11を上記管Pの半径方向に指向させて支持し、上記管Pの軸線まわりに回動可能な回動部20と、該回動部20に接続され、該回動体20を上記管の周方向および軸線方向に駆動する駆動部30とを備える塗装装置において、上記駆動部30は、上記管Pの内面で周方向の一部をなす非塗布域以外の塗布域に対応する塗布角で上記回動体20を周方向にて往復回動させるように設定されている。
(もっと読む)
塗膜形成装置
塗装に要するスペースの省スペース化を実現することができる塗膜形成装置を提供する。
被塗装物(50)を移動する被塗装物移動装置(41)と、塗料を噴霧する噴霧ガン(30)を移動する噴霧ガン移動装置と、被塗装物移動装置(41)、噴霧ガン(30)および噴霧ガン移動装置の作動を制御する制御装置とを備え、前記制御装置は、噴霧ガン(30)から塗料を噴霧させた状態で、被塗装物(50)を往復運動させながら部分的な重ね塗りが順次行われるように一定方向に移動させる塗膜形成装置であって、前記制御装置は、被塗装物(50)の塗装中において、被塗装物(50)と噴霧ガンとの相対位置を一定に保った状態で被塗装物(50)および噴霧ガン(30)をシフト移動させる塗膜形成装置。  (もっと読む)
(もっと読む)
パターン形成装置、パターン形成方法
【課題】高精度かつ安定的にパターン形成を行い、歩留まりを向上させることを可能とするパターン形成装置等を提供する。
【解決手段】パターン形成装置1は、BM、基板側ステージ3、ヘッド側ステージ5の位置を計測し、計測した位置データに基づいて、標準塗布データ41に補正処理を施して補正塗布データ43を作成し、当該補正塗布データ43に基づいて、インク吐出タイミング(吐出開始、吐出終了)を制御し、基板側ステージ3とヘッド側ステージ5との間の相対位置を制御する。また、パターン形成装置1は、基板上の白欠陥、黒欠陥、突起等の欠陥の有無及び位置を検出し、追加塗布データ45を作成し、当該追加塗布データ45に基づいて、欠陥箇所に追加塗布を行う。
(もっと読む)
1 - 4 / 4
[ Back to top ]