
Fターム[4L056EC88]の内容
紡績及び撚糸 (4,539) | 検出、制御の対象、内容、時期 (328) | 時期 (65) | 移動中 (4)
Fターム[4L056EC88]に分類される特許
1 - 4 / 4
ボビン搬送システム
【課題】自動ワインダー、精紡機及び搬送装置からなるボビン搬送システムにおいて、送り手段に掛かる負担を増大させることなく、状況に応じてボビン搬送速度(単位時間あたりのボビン搬送数量)を増減し、効率的にボビンを装着したトレイを搬送することができるボビン搬送システムを提供する。
【解決手段】自動ワインダー2、精紡機1、前記自動ワインダー2と前記精紡機1との間を連結するボビン搬送路7を有するボビン搬送装置10からなるボビン搬送システムにおいて、該ボビン搬送装置10を、ボビン搬送路7に沿ってボビンBを装着したトレイTを案内する搬送案内部材3と、往復運動して前記トレイTを移動させる移動部材24を有する送り手段4と、から構成し、該送り手段4のボビン搬送数量を変更することで前記ボビン搬送路7上でのボビン搬送速度が前記自動ワインダー2の処理能力に応じて変更可能に構成する。
(もっと読む)
糸処理装置の作業台車の制御方法、および糸処理装置

【課題】糸処理装置における作業台車の制御方法であって、相互干渉位置に存する二台のユニットからサービス処理が出された場合でも、作業台車を無駄なく走行移動させて、作業効率良くユニットに対するサービス処理を実行できるようにする。
【解決手段】ユニット2および作業台車4a・4bの幅寸法に基づいて、両作業台車4a・4bが近付いたときに相互に干渉し合い、同時的な作業処理が不可能となる領域を、「干渉エリア」として規定する。そして、二台のユニット2からサービス処理要求が出されると、作業台車4a・4bの走行移動に先立って、かかる干渉エリアを基準として、相互干渉状態に至っているか否かを判定し、相互干渉状態に至っていると判定した場合には、各作業台車4a・4bの現在位置から、処理要求ユニット2・2までの距離を測定し、処理要求ユニット2までの距離が短い一方の作業台車4a・4bによるサービス処理を優先的に実行させる
(もっと読む)
繊維機械
【課題】繋ぎ目の状態などを簡単にチェックできるように糸継ぎ動作を制御するチェックモードを有する。
【解決手段】給糸側からの糸Yを巻き取る巻取り手段5と、糸欠点を検出する手段32と、この糸欠点検出手段32で糸欠点を検出したときに、糸欠点を切断、除去して給糸側及び巻取側の各糸端Y1,Y2を繋ぐ糸継ぎ手段7とを備え、巻取り手段5及び糸継ぎ手段7の動作を司る制御手段15を備え、この制御手段15は、糸継ぎ手段7による各糸端Y1,Y2の糸継ぎ動作の途中又は終了後に、糸継ぎ手段7及び巻取り手段5の動作を中止するよう制御するチェックモードを有している。
(もっと読む)
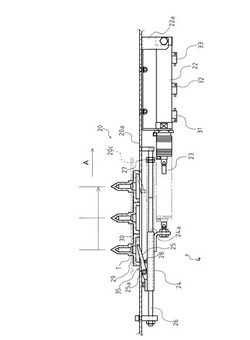
コップの配向を検知するための装置
【課題】コップ、特に紡績コップの配向を検知するための装置であって、コップの光学的な走査を行なう装置と走査過程を評価するための評価装置とを有する装置を改善してその周期出力を高めることである。
【解決手段】本発明の課題は当該装置(12)がコップ搬送区間(9)の領域に、当該装置(12)を通過する、ほぼ長手方向に配向された紡績コップ(4)を区分的に走査できるように配置されておりかつ当該装置(12)が光源(17)、第1の円筒レンズ(20)、ギャップ絞り(22)、第2の円筒レンズ(30)、ミラーエレメント(27)並びにフォトセンサ(28)で装備されていることによって解決された。
(もっと読む)
1 - 4 / 4
[ Back to top ]