
Fターム[5F157CD23]の内容
Fターム[5F157CD23]に分類される特許
1 - 5 / 5
加圧流体を使用して半導体基板を洗浄する装置及び方法
本発明の実施形態は概して、半導体基板を研磨プロセス後に洗浄する装置及び方法に関するものである。具体的には、本発明の実施形態は、加圧流体を使用して基板を洗浄する装置及び方法に関するものである。本発明の一実施形態は、基板を略垂直な姿勢で支持し、回転させる2つのローラと、押圧力を加えて、前記基板を前記2つのローラに係合させる圧力ホイールと、加圧流体を前記基板に向けて放出するように構成される揺動ノズルと、を備える。 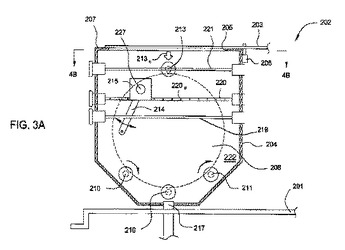 (もっと読む)
(もっと読む)
基板処理装置
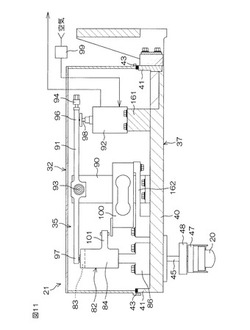
【課題】ブラシにより基板を洗浄処理する基板処理装置の高さを低減すること。
【解決手段】シーソー部材91は、支持部材90を支点として揺動可能であって、支点93に対して一方側に力点部96を有し、支点93に対して他方側に作用点部97を有している。押圧用アクチュエータ92は、力点部96の下方に配置されており、ブラシ20を基板に押し付けるための押し付け力を当該力点部96に与えて、シーソー部材91を揺動させる。前記押し付け力は、作用点部97からブラケット82および回転シャフト45等を介してブラシ20に伝達される。
【効果】押圧用アクチュエータ92をシーソー部材91の下方に配置することにより、ハウジング32の高さが低減されており、これによって、基板処理装置の高さが低減されている。
(もっと読む)
基板処理装置および該装置の制御方法

【課題】回転させた基板に処理液を供給して所定の処理を行い、しかも、基板から外方へ飛散する処理液を受け止める飛散防止部材を設けた基板処理装置および該装置の制御方法において、装置の異常を確実に検出する。
【解決手段】飛散防止部材を昇降させる一対のサーボモータ119のそれぞれにかかる負荷トルクを検出するトルク検出部5122を設ける。両サーボモータ119のいずれかにかかる負荷トルクが極端に小さいとき、および、両サーボモータ119の負荷トルク差が大きいとき、同期制御装置511は装置に異常があるものと判定してモータの駆動を停止する。
(もっと読む)
基板処理装置
【課題】ブラシの交換時期を適切に判断することができる、基板処理装置を提供する。
【解決手段】ウエハWの裏面の周縁領域14および周端面15に対する裏面洗浄処理時には、ブラシ16は、裏面処理時位置に配置され、スピンチャック3に保持されたウエハWの周縁部に対して押し込まれる。そして、その状態が所定時間にわたって維持された後、ブラシ16は、ウエハWから離間される。一方、ブラシに加わる荷重が圧力センサにより検出され、その検出される荷重に基づいて、制御部により、ブラシ16が裏面側処理時位置に配置されたか否かが判断される。そして、ブラシ16が裏面側処理時位置に配置されたと判断された時点からブラシ16がウエハWからの離間のために移動し始めるまでの時間が計測され、その時間がメモリに累積して記憶される。
(もっと読む)
基板洗浄装置及び洗浄部材の交換時期判定方法
基板洗浄装置は、洗浄部材2に押し付けてこれを洗浄する当接部材14、当接部材14を駆動制御する駆動制御手段21、及び洗浄液11を収納し洗浄部材2と当接部材14の当接部分を浸漬させる洗浄槽12を含む洗浄装置10、洗浄部材2の表面画像を取り込む画像取得手段16、並びに画像処理装置17を含み、洗浄部材2の表面状態をモニターしその交換時期を判断する。基板洗浄装置は、洗浄槽12内の洗浄液11中のパーティクル数及び/又は成分濃度を測定する測定手段13を具備し、測定手段13による測定結果を駆動制御手段21にフィードバックし、洗浄部材2の汚染を防止する。  (もっと読む)
(もっと読む)
1 - 5 / 5
[ Back to top ]