
Fターム[5H004JB06]の内容
フィードバック制御一般 (10,654) | 検出部(オブザーバを含む) (399) | 画像信号で検出するもの (4)
Fターム[5H004JB06]に分類される特許
1 - 4 / 4
移動体の動作制御装置及びこれを用いたスロッシング制御装置
【課題】 移動体の状態を反映する画像情報をもとに、特徴量を抽出する手法を用いることはなく移動体を的確に制御することを可能にする移動体の動作制御装置を提供する。
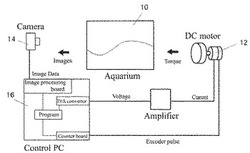
【解決手段】 水を収容した水槽10と、水槽10を一方向に往復動させる駆動部12と、水槽10を視認するカメラ14と、カメラ14により取得された画像情報に基づき駆動部12により水槽10を制御して水槽10内の水を揺動状態から静止状態へ整定する制御部16とを備えるスロッシング制御装置であって、制御部16は、カメラ14から所定周期にしたがって順次取り込まれる水槽10中の水の画像情報を、数ベクトル空間を除くヒルベルト空間における1点と解釈して、安定化制御方法により、水槽10内の水を揺動状態から静止状態へ整定するようにモータ12を制御することを特徴とする。
(もっと読む)
制御装置、制御方法及びコンピュータプログラム

【課題】制御対象となる系の数が膨大であっても、所望の収束点に系の挙動を収束させることができる制御装置、制御方法及びコンピュータプログラムを提供する。
【解決手段】N個の系の状態に基づいて決定される評価値が目標値にどれくらい近いかを反映した変数Actの値を記憶する。変数Actの値とN個の系のそれぞれの現在の挙動とに応じて、系がとるべき次の挙動を決定する。N個の系のそれぞれの挙動が安定しているか否かを判定し、少なくとも一の系の挙動が安定していないと判定した場合、安定していないと判定された系がとるべき次の挙動を、正数である変数Actにノイズ値を乗算して決定する。
(もっと読む)
ファジィ制御装置、レーン走行支援装置、および操舵補助装置
【課題】ファジィルールを合理的に選定する。
【解決手段】ファジィ制御装置は、複数の入力変量に対しファジィ推論を行って出力変量を生成し、生成した出力変量を制御対象に出力して制御するものである。ファジィ推論に利用されるファジィルールは、複数の入力変量に関するリヤプノフ関数Vの安定条件を示す条件式dV/dt<0と、複数の入力変量の少なくとも1つの時間微分と出力変量との対応関係を示す関係式とに基づいて選定される。これにより、各入力変量に対応するメンバーシップ関数を2つに減らし、ファジィルールの数を2n(nは入力変量の数)に減らすことができる。
(もっと読む)
モーションキャプチャシステムを用いた閉ループフィードバック制御
モーションキャプチャシステムを用いた制御可能装置の閉ループフィードバック制御のためのシステムおよび方法が開示される。一実施例では、システムは、1つ以上の制御可能装置が制御体積内で作動している際に、1つ以上の制御可能装置の1つ以上の運動特性を測定するよう構成されたモーションキャプチャシステムを含む。プロセッサは、モーションキャプチャシステムから測定された運動特性を受信し、測定された運動特性に基づいて制御信号を決定する。位置制御システムは制御信号を受信し、所望の位置状態を維持または達成するために、1つ以上の制御可能装置の少なくとも1つの運動特性を連続して調節する。制御可能装置は受動的な逆反射マーカを装備していてもよい。モーションキャプチャシステム、プロセッサ、および位置制御システムは、完全な閉ループフィードバック制御システムを備える。  (もっと読む)
(もっと読む)
1 - 4 / 4
[ Back to top ]