
Fターム[5H004KC37]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 適応制御 (647) | 適応動作が切換えのもの (90)
Fターム[5H004KC37]の下位に属するFターム
制御手法の切換え (8)
制御パラメータの切換え (77)
Fターム[5H004KC37]に分類される特許
1 - 5 / 5
モータ制御回路
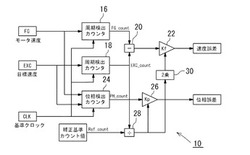
【課題】モータの速度を可変制御するモータ制御回路において、設定されるモータの速度に応じた適切な制御ゲインを自動的に設定可能なモータ制御回路を提供する。
【解決手段】本発明に係るモータ制御回路10は、速度検出手段FGから入力される検出信号の周期FG_countと外部から入力される基準信号EXCの周期EXC_countとの差に応じた周期誤差信号を出力する周期誤差信号出力手段20と、周期誤差信号に速度ゲインを乗算して得られる速度誤差信号を出力する速度誤差信号出力手段22と、基準信号EXCの周期EXC_countに対する補正基準周期Ref_countの比を補正量とし、その補正量を2乗して速度誤差信号出力手段22が備える所定の速度ゲインKfに乗算することにより、所定の速度ゲインKfを補正するゲイン補正手段28、30とを備えている。
(もっと読む)
制御装置、移動体、制御方法、及びプログラム

【課題】複数のフィードバック補償器を有し、これらを順次切り換える制御系において、切り換え時の過渡応答の特性を向上させるようにする。
【解決手段】切換以降の過渡応答、制御入力の振幅、制御入力の差分値、及び切換直前と直後の制御入力の差分値を抑制する評価関数を設計し、この評価関数を最小化する倒立2輪走行用フィードバック補償器60の状態ベクトルの初期値を与える。これによって、制御切換後の過渡応答や、制御入力の振幅、不連続性を向上させることができる。
(もっと読む)
ゲイン調整装置、ゲイン調整方法、ゲイン調整プログラム
【課題】外乱変動の影響を低減し、高精度にループゲインの調整を行うことが可能なゲイン調整装置、ゲイン調整方法、ゲイン調整プログラムを提供することを目的としている。
【解決手段】本発明では、閉ループ回路のループゲイン調整において、ループゲイン調整を複数回実行してループゲインを収束させ、ループゲインの値が収束した後に、外乱変動の影響を考慮して適切に設定された回数のループゲイン調整結果を平均した値を最終的なループゲインの値とする。
(もっと読む)
制御装置
【課題】制御対象の周波数特性の動的な変化の影響を適正に補償して、制御対象の出力の制御を良好に行うことができる制御装置を提供する。
【解決手段】例えば排気系Eを制御対象とする制御ユニット7は、排気系Eの出力を検出するO2センサ6の出力等を用いて排気系Eのモデルのパラメータを同定し、その同定値を用いてO2センサ出力を所定の目標値に収束させるように排気系Eへの入力を規定する操作量を求める。パラメータの同定においては、モデルの出力とO2センサ6の出力との偏差にフィルタリング処理を施したものを最小化するように、パラメータを同定する。フィルタリング処理の周波数に対するゲイン特性は、排気系Eの周波数特性に影響を及ぼす排ガス流量に応じて適宜変更される。
(もっと読む)
制御装置
【課題】比較的高い周波数で変動する指令入力に制御対象の出力を遅れることなく追従させる制御装置を提供する。
【解決手段】指令入力の変動分の基本波成分の周期の1/N倍の時間毎に1からNまでの整数を鋸波状にインクリメントして出力する位相選択器と、N個のフィルタ群と、前記フィルタ群の中から前記位相選択器の出力で選択された1つのフィルタの入力にフィードフォワード演算器の出力を接続し前記フィルタの出力を選択して出力するフィルタ選択器とを具備し、前記フィルタ選択器の出力を安定化補償装置の出力に加算する。
(もっと読む)
1 - 5 / 5
[ Back to top ]