
Fターム[5H004KD51]の内容
フィードバック制御一般 (10,654) | 制御部 (227) | 知識ベース型制御(ファジー制御を除く) (13)
Fターム[5H004KD51]の下位に属するFターム
推論 (5)
知識ベースの構造
知識をオンラインで作成、修正するもの (2)
他の制御器を調整するもの
順序、スケジュールを決定するもの (3)
ハードウェア
Fターム[5H004KD51]に分類される特許
1 - 3 / 3
実空間アプリケーションサービスの制御システム及び制御方法
【課題】シナリオの導入及び解除に伴うコスト低減、適切な機器競合の検出及び解消方法、シナリオを複数ユーザで利用可能とする利用形態の多様性を実現することができる実空間アプリケーションサービスの制御システムを提供する。
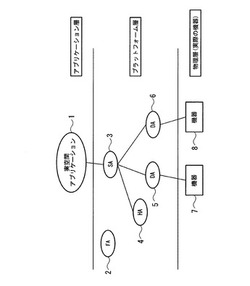
【解決手段】実空間アプリケーションサービスは、これに対応するアプリケーションソフトウェアが実行されることにより実現され、その内容はアプリケーションソフトウェアの記述できる範囲において自由に変えることができるともに、アプリケーションソフトウェアは複数同時に存在し、動作することが可能であり、実空間アプリケーションサービス、実空間アプリケーションサービスを制御するシステムのユーザ、機器、実空間アプリケーションサービス及び実空間アプリケーションサービスが提供される場所のそれぞれに対応したソフトウェアエージェントを具備する。
(もっと読む)
自動適合装置及び方法

【課題】効率的且つ効果的に適合値を決定する。
【解決手段】自動適合システム100において、次善最適解決定処理が実行される。当該処理においては、パラメータx1及びx2に応じて変化する目的関数F1及び制約関数F2相互間のパレート解が、適合範囲内のパラメータ値について導出され、目的関数F1及び制約関数F2により規定される座標平面上で、パレート解に対応する座標点を繋げて得られるパレート解曲線PRF_Pが設定される。一方、当該適合範囲でパラメータを変化させた場合の、目的関数F1及び制約関数F2各々における最大値と最小値との偏差DOPT及びDLIMに基づいて規定される傾きkに、更にエンジン200の定常比率Aに応じて定まる補正係数αを乗じてなる傾きk’の直線が設定される。この直線とパレート解曲線との接点に対応するパレート解が、次善的な最適解として抽出される。
(もっと読む)
パソコン・バイオ・ナノ・IT機器装脱着施術設置など々、の生活ナレッジナノクローンシステム携帯電話機ロボット(以下ロボットと記す)
【課 題】 人間は、神様の創造物であるとするならば、ロボットは、人間の創造物であり、パートナーとすることで、人間に役だつ機能を具備構成し、日常生活に手助け有効な生活ナレッジナノクローンシステム携帯電話機ロボツトが、人間を上廻る知能を、なしえない事もやってくれるロボットを提供する。
【解決手段】 携帯電話機本体がロボット(検索ロボット呼称など)の役目をする。有線、無線基地局、インターネットプロトコル電話局などと通信して、情報交換、制御データベース変換、履歴ファイル処理、データに基づいた画・映像表示、言語翻訳音声認識、記憶、プログラム入出力指示、発着信指示、駆動指示、電波電源タイムスイッチ切り替え指示入出力部、通信、データモード、識別コード、GPS位置情報等々有し構成する。通信網を介して、ITバイオインフォマティクスロボット、センサーで安全に飛行するロボットを、車の代用とする。又多種多様のロボットを提供できる。
(もっと読む)
1 - 3 / 3
[ Back to top ]