
Fターム[5H004LA06]の内容
フィードバック制御一般 (10,654) | 制御対象の特性 (738) | 非線形要素を含むもの (53) | 不感帯を有するもの (6)
Fターム[5H004LA06]に分類される特許
1 - 6 / 6
制御装置及び制御方法
【課題】状態に応じて制御則を切り替えて操作量を演算する制御装置及び制御方法のために演算負荷を低減する手法を提供する。
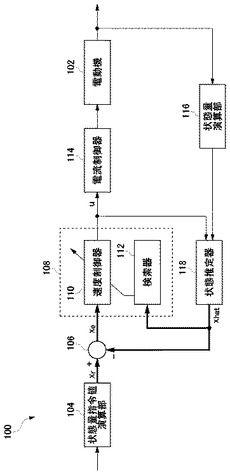
【解決手段】制御装置100は、状態空間を分割する複数の凸多面体の各々に制御則が対応付けられており、状態ベクトルの属する凸多面体に対応する制御則を使用して操作量を演算する速度制御器110と、状態空間を規則的に区切る複数のメッシュのうち状態ベクトルの属するメッシュに関連する制御則を候補として、状態ベクトルの属する凸多面体に対応する制御則を該候補から決定する検索器112と、を備える。
(もっと読む)
プロセス工場向け自己診断プロセス制御ループ
適応可能プロセス制御ループを診断する方法は、プロセス制御ループ信号データを測定すること、プロセスループ信号データから複数のプロセス制御ループパラメータを生成すること、複数のプロセス制御ループパラメータの一つ又は複数から適応可能プロセス制御ループの状態を評価することを含む。プロセス制御ループデータは、適応可能プロセス制御ループがプロセス制御環境内でオンライン接続されているとき、適応可能プロセス制御ループ内の一つ又は複数のプロセス制御装置の通常動作の結果として生成される。自己診断プロセス制御ループは、プロセス制御ループの各構成部分及びプロセス制御ループ全体に対するプロセス制御ループパラメータに関する診断指標を受け取るように適応された診断ツールを含む。各診断指標は、対応する指標演算ツールにより信号データから生成される。診断ツールはさらに、診断指標の一つ又は複数からプロセス制御ループの状態を評価するようにも適応される。  (もっと読む)
(もっと読む)
PWM駆動方法とPWM駆動装置

【課題】PWM駆動方法において、入力誤差信号のゼロ付近の入力でも出力応答させ不感帯をなくす制御方法を提供する。
【解決手段】スイッチング素子121,122,221,222で構成されるブリッジ回路の出力端子の間にアクチュエータ9を接続し、信号G1UとG1L,G2UとG2Lでアクチュエータ9に通電してPWM制御するに際し、スイッチング素子121と122,221と222が同時にオフする区間(デッドタイム)を設けた駆動タイミング信号を生成するとともに、それらのデッドタイムが一対のハーフブリッジ回路の相互間で重ならないようにアクチュエータ9を駆動することで、小さい時間差の差動入力PWM信号(S51−S52)でも応答できる。
(もっと読む)
システム同定装置
【課題】微小動作で電動機の粘性摩擦とクーロン摩擦を同定できるシステム同定装置を提供する。
【解決手段】速度指令発生器201、速度制御器202、トルク制御器203、電動機204、位置検出器205、微分器206、第1摩擦同定器位置207を備え、第1摩擦同定器位置207は、位置を入力しその入力信号振幅である位置振幅を出力する振幅演算器101と、速度指令と速度を入力し、入力エネルギを出力する第1入力エネルギ演算器102と、前記位置振幅と前記入力エネルギを入力し電動機204の粘性摩擦とクーロン摩擦である摩擦同定値を算出し出力する粘性摩擦クーロン摩擦演算器103を備える。
(もっと読む)
システム同定装置およびそのシステム同定方法
【課題】可動範囲の限定された負荷の付いた電動機の慣性モーメントと粘性摩擦を同定できるシステム同定装置およびそのシステム同定方法を提供する。
【解決手段】速度指令発生器201、速度制御器202、トルク制御器203、電動機204、位置検出器205、微分器206、慣性モーメント粘性摩擦同定器207を備え、慣性モーメント粘性摩擦同定器207は、トルク指令を入力しトルク指令振幅を出力するトルク指令振幅演算器101と、位置を入力し位置振幅を出力する位置振幅演算器102と、前記トルク指令振幅と前記位置振幅を入力し慣性モーメント粘性摩擦同定値を算出し出力する第1慣性モーメント粘性摩擦演算器103を備える。
(もっと読む)
機械特性モデル化装置、電動機制御装置、機械制御システムおよび機械特性モデル化方法
【課題】機械モデル化に誤差が生じないように摩擦を考慮できるようにする。
【解決手段】周波数特性演算装置6と、機械モデル推定手段10と、周波数特性ピーク検出手段11と、減衰推定値解析手段12とを備え、機械特性モデル7には剛体負荷モデル8と摩擦モデル9と、さらに、共振モデル18と反共振モデルと減衰モデル20とを備えた振動系モデル17を備え、最小二乗法もしくは曲線適合により周波数特性から機械モデルを求める。
(もっと読む)
1 - 6 / 6
[ Back to top ]