
Fターム[5H004LA08]の内容
フィードバック制御一般 (10,654) | 制御対象の特性 (738) | 非線形要素を含むもの (53) | 飽和要素を有するもの (5)
Fターム[5H004LA08]に分類される特許
1 - 5 / 5
モータ制御装置、及びモータ制御方法
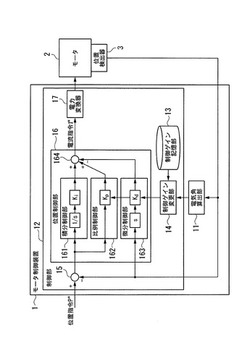
【課題】コアを有するモータを制御する際の位置決め精度を向上させるモータ制御装置、及びモータ制御方法を提供する。
【解決手段】コイルが巻回されたコアを有するモータを制御するモータ制御装置は、前記モータの可動子の位置から電気角を算出する電気角算出部と、前記電気角算出部が算出した電気角に応じた制御ゲインを用いて、前記モータの駆動を制御する制御部とを具備する。
(もっと読む)
起動装置および起動方法

【課題】工業炉などの産業用の製造装置に適した制御の再起動を実現する。
【解決手段】起動装置1は、降温速度ΔPVと休止時間TWと操作量上限値OHとオフ時間TXとの組からなる分析用データを記憶する分析用データ記憶部2と、分析用データを用いて多変量解析手法により推定用多項式を算出する推定用多項式算出部3と、推定用多項式を記憶する推定用多項式記憶部4と、降温速度ΔPVと休止時間TWと操作量上限値OHのオンラインデータを取り込んでオフ時間TXの推定値を算出するオフ時間TX推定値算出部5と、制御装置10に対してヒータをオフにさせる指令を与え、オフ時間TX推定値の時間だけ維持した後に、通常の制御を再起動させる動作指令部6とを備えている。
(もっと読む)
制御装置および制御方法
【課題】制御量を設定値に近づける特性を完全に犠牲にしてしまうことは避けつつ、過渡状態、整定状態に関係なくエネルギー消費量を抑制する。
【解決手段】制御装置は、各制御ループの制御量PV1,PV2と設定値SP1,SP2との偏差に基づいて操作量MV1,MV2を算出するPID演算部22−1,22−2と、操作量MV1とMV2との操作量差δMVを算出する操作量差算出部31−1と、操作量差δMVの絶対値が規定値Δを超える場合に操作量差δMVの絶対値が小さくなるように、ゾーンZ1に出力する操作量MV1を変更する操作量変更部32−1とを備える。
(もっと読む)
モデル予測制御装置、プログラム
【課題】制約付きモデル予測制御において制約の緩和回数が増えて実行時間オーバを起こす可能性を低くする。
【解決手段】条件付き最適化計算に用いる制約の復帰処理において、現在の制御量検出値yが特定の制約復帰条件を満たすかどうかを判断し(ステップS21)、満たす場合のみ制約緩和レベルは一段復帰させる(ステップS22)。所定の制約復帰条件を満たさない限り制御量制約の復帰を行わないようにすることで、制約付き最適化計算において解なしとなる可能性を低くし、以って、制約の緩和が再度必要になる可能性を低くできる。これより、計算負荷が大きい制約付き最適化処理の頻度が大きくなることを防止し、実行時間増大を防止できる。
(もっと読む)
アンチワインドアップコントローラ
【課題】 コントローラ設計時にアンチワインドアップ補償のための特別な設計が不要であり、かつ制御演算実行時の計算負荷が小さくて演算量が安定しているアンチワインドアップコントローラを提供する。
【解決手段】 コントローラからの操作量を監視して操作量飽和の発生が予測される時に、実時間操作量が操作量の制限値(上限と下限のいずれか一方又は両方)と等しくなるように仮想時間操作量から時間軸関数値を算出して時間軸変換を行うことにより、操作量飽和をそもそも発生させないようにする。そのため、仮想時間操作量が操作量の制限値を満足しているかどうかの判定により操作量飽和を生じていない場合には、時間軸関数値を1とし、操作量飽和を生じていると判定された場合には、実時間操作量の要素の少なくとも1つが前記操作量の制限値の対応する要素と等しくなるように仮想時間操作量から時間軸関数の値を算出し、その関数値に基づいて仮想時間操作量を、操作量飽和を生じていない実時間操作量に変換する。
(もっと読む)
1 - 5 / 5
[ Back to top ]