
Fターム[5H301HH07]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の操舵態様 (687) | 偏位量、偏位角に対する演算処理の限定 (35) | リミッタ特性を有するもの (1)
Fターム[5H301HH07]に分類される特許
1 - 1 / 1
走行輪独立操舵の無人車両及びその走行制御方法
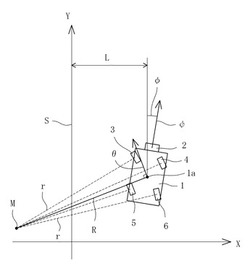
【課題】目標経路及び目標方向に対してオフセットと姿勢ずれが同時に発生した場合に、スムーズですばやく安定して経路修正する。
【解決手段】
複数の走行輪が独立して操舵可能とする無人車両において、走行制御手段は、オフセット量Lとずれ角φとが同時に生じた際に、オフセット量Lをなくす方向に操舵角θを設定し、無人車両の中心1aから操舵角θに直交するずれ角φの反対側に旋回中心Mを設定し、旋回中心Mから各走行輪の中心までを結ぶ直線rに直交するように各走行輪3,4,5,6の方向を設定する。
(もっと読む)
1 - 1 / 1
[ Back to top ]