
日本輸送機株式会社により出願された特許
1 - 10 / 320
無人搬送システム
Notice: Undefined index: from_cache in /mnt/www/gzt_applicant_list.php on line 189
無人車両
【課題】誘導ラインが途中で断線していたとしても、姿勢角を修正しながら安定して走行し続けることができる無人車両を提供する。
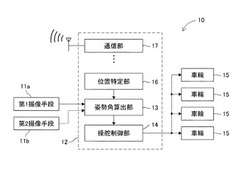
【解決手段】本発明に係る無人車両10は、車長方向に延びる車体中心線上に離間して設けられ、路面の画像データをそれぞれ出力する第1撮像手段11aおよび第2撮像手段11bと、画像データに基づいて姿勢角を算出する姿勢角算出部13と、姿勢角が目標値になるように車輪15の操舵角を制御する操舵制御部14とを備える。姿勢角算出部13は、第1撮像手段11aおよび第2撮像手段11bから出力された2つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出する第1算出動作、および第1撮像手段11aまたは第2撮像手段11bから出力された1つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出する第2算出動作を選択的に行う。
(もっと読む)
ステアリング制御装置

【課題】走行モードの切換時において簡単な制御によって作業性を向上させたステアバイワイヤ方式のフォークリフトのステアリング制御装置を提供する。
【解決手段】ハンドルと、ドライブ輪と、制御手段と、走行モード切換手段と、第1および第2の走行モードにおけるハンドルの操作角度θHとドライブ輪の旋回角度θDの第1および第2の対応関係とθDの第1および第2の有効角度範囲を記憶する記憶手段とを備え、ハンドルが第1の操作角度θH1に配置されてドライブ輪がθH1に対応する第1の旋回角度θD1に配置された状態の第1の走行モードを第2の走行モードへ切換える時、θD1が第2の有効角度範囲になく、θH2=θH1+360×N(Nは整数)なる第2の操作角度θH2に対応する第2の旋回角度θD2が第2の有効角度範囲に存在する場合に、制御手段はθH1を第2の有効角度範囲のθD2に対応するθH2に変更してθD1をθD2に変更する。
(もっと読む)
バッテリストッパーおよびそれを備えたバッテリ式フォークリフト
【課題】第2ロック部材の未装着を防止するとともに、振動や衝撃等による第2ロック部材の外れを防止することができるバッテリストッパーおよびそれを備えたバッテリフォークリフトを提供する。
【解決手段】バッテリカバー10と第1ロック部材20と第2ロック部材30とが備えられる。バッテリカバーは一端に係合部11を有する。第1ロック部材は、係合部に係合可能な被係合部21と、係合部と被係合部とを係合又は係合解除可能に操作するレバー部22とを有する。第2ロック部材は、係合部に被係合部とともに係合可能な第1辺部31と、第1辺部を係合位置又は係合解除位置にガイドする第2辺部32と、当接部33とを備える。第2ロック部材が係合位置にある時、当接部がレバー部に当接しなくなって、係合部と被係合部の係合が可能になる一方、第2ロック部材が係合解除位置にある時、当接部がレバー部に当接して、係合部と被係合部の係合が不可能になる。
(もっと読む)
走行制御装置
【課題】安定した走行状態から目標速度が大きく変化しても車両が急加速しないようにする。
【解決手段】走行制御装置1は、目標速度と走行速度との偏差を比例積分演算して第1トルク指令値を算出し、正の加速度制限値と加速度との偏差を比例積分演算して第2トルク指令値を算出し、負の加速度制限値と加速度との偏差を比例積分演算して第3トルク指令値を算出し、第1乃至第3トルク指令値を比較し、モータ10に対するトルク指令値を第2トルク指令値および第3トルク指令値の範囲に制限して決定し、車両が目標速度で走行するよう制御する。第2トルク指令値の算出における比例積分演算の積分値の上限となる正の積分制限値が目標速度と走行速度との偏差の絶対値にゲインを乗じた値に、第3トルク指令値の算出における比例積分演算の積分値の下限となる負の積分制限値が目標速度と走行速度との偏差の絶対値にゲインを乗じて負の符号を付した値に設定される。
(もっと読む)
充電装置
【課題】電圧検出器等の新たな構成を追加することなく、中間タップ付きのバッテリーを過不足なく充電することができる充電装置を提供する。
【解決手段】全電圧と中間電圧とを出力可能なバッテリー3を充電する充電装置1であって、バッテリー3に直流電圧を出力する出力回路4と、出力回路4の出力状態をオン状態とオフ状態とに制御する制御回路5とを備え、制御回路5は、全電圧検出手段10と、充電を開始してから全電圧検出手段10で検出された電圧値が設定電圧値に達するまでの第1充電時間を測定する第1充電時間測定手段11と、設定電圧値に達してから充電が完了するまでの第2充電時間を算出する第2充電時間算出手段12とを有し、設定電圧値は、中間電圧が転極点をむかえるときの全電圧の電圧値に設定されており、第2充電時間は、全電圧の電圧値および充電時間の相互関係を示す充電特性と、第1充電時間とに基づいて算出されることを特徴とする。
(もっと読む)
バッテリプラグ固定具
【課題】防爆検定を受けた防爆型のバッテリ式フォークリフトに対して、バッテリ側プラグ等の構造を変更する必要がなく、バッテリ側プラグと充電器側プラグとを強く固定できるようにする。
【解決手段】バッテリ64と車体フレーム600との間に形成される細長空間21に挿入可能な挿入プレート部10と、充電器側プラグ14を支持する支持プレート部11と、挿入プレート部10を細長空間21に挿入した際に、車体フレーム600に設けられたロック部601,601に対して係合可能な係合部12,13とを備え、挿入プレート部10を細長空間21に挿入して、係合部12,13とロック部601,601とを係合することで、充電側プラグ14とバッテリ側プラグ20とが強く固定される。
(もっと読む)
リーチ型フォークリフト
【課題】フォークがガイドレールに引っ掛かることなくスムーズに作業可能にする。
【解決手段】一対のフォーク7と、各フォーク7を車体の前後方向に進退するためのキャリッジと、車体の前後方向に延設された一対のリーチレグ3と、各リーチレグ3の内側に沿って設けられ、キャリッジに設けられたガイドローラを案内するためのガイドレール30とを備え、リーチレグ3は、その前端部にロードホイールカバー8を備え、ロードホイールカバー8は、傾斜部80を備え、傾斜部80は、フォーク7がガイドレール30に引っ掛からないように導くための傾斜面を有する。
(もっと読む)
リーチ型フォークリフト
【課題】駆動輪の空転状態を自力で解消することができるリーチ型フォークリフトを提供する。
【解決手段】車体2と、車体2の下部に設けられた駆動輪4と、車体2の下部から前方に向かって延びたガイドレール5と、ガイドレール5に沿って前後に移動可能に設けられたマスト装置6と、車体2とマスト装置6との間に伸縮可能に設けられたリーチシリンダ7とを備え、リーチシリンダ7の伸縮によりマスト装置6が前後に移動するリーチ型フォークリフト1Aであって、マスト装置6に設けられ、かつ先端が路面に向けられた少なくとも1つの接地用油圧シリンダ9をさらに備え、接地用油圧シリンダ9を伸長させて接地用油圧シリンダ9の先端を路面に押し付けた状態で、リーチシリンダ7を伸縮させることにより、リーチシリンダ7からマスト装置6に加わる力の反力で車体2が前後に移動することを特徴とする。
(もっと読む)
無人搬送システム
【課題】マーカーを設けることなく無人搬送車の走行速度を制御することができる無人搬送システムを提供する。
【解決手段】路面に敷設された誘導ライン2Aと、該誘導ライン2Aに沿って所定の走行速度で走行する無人搬送車3とを備えた無人搬送システム1Aであって、誘導ライン2Aは、異なる色で着色された複数の着色領域2a、2bを有し、無人搬送車3は、誘導ライン2Aを含む領域の画像データを生成する撮像手段4a、4bと、生成された画像データにおける着色領域2a、2b間の境界線の数に基づいて目標速度を設定する目標速度設定部5と、目標速度に一致するように走行速度をフィードバック制御する走行制御部7と、境界線の数と走行速度との関係があらかじめ格納された記憶部6とを有することを特徴とする。
(もっと読む)
1 - 10 / 320
[ Back to top ]