
Fターム[5H505GG03]の内容
交流電動機の制御一般 (51,584) | 制御系 (3,480) | 速度フィードバックするもの (760) | 負荷速度をフィードバックするもの (6)
Fターム[5H505GG03]に分類される特許
1 - 6 / 6
電動パワーステアリング装置
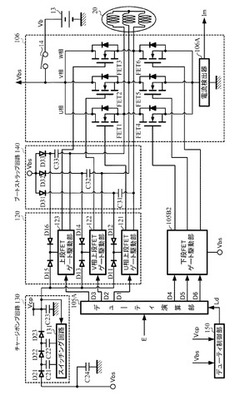
【課題】インバータのFETの駆動を簡易な構成と制御で安定的に行い得るようにした電動パワーステアリング装置を提供する。
【解決手段】PWMの各相デューティ指令値に基づいて、FETブリッジで成るインバータ106によりモータ20を駆動制御し、操舵系をアシスト制御するようになっている電動パワーステアリング装置において、FETブリッジの上段FETを駆動するための昇圧電源電圧を生成するチャージポンプ回路130及びブートストラップ回路140を具備し、高い方の電圧を昇圧電源電圧とする。
(もっと読む)
電動パワーステアリング装置

【課題】部品点数の増加やコストアップを抑制した簡素な構成のモータ回転角検出手段を使用して運転者に不快感を与えることを抑制する。
【解決手段】運転者の操舵量に応じた前記電動モータの相対角度情報を算出するモータ相対角度情報算出部48a〜48cと、該モータ相対角度情報算出部が相対角度情報を得られない状態となることを防止して常時相対角度情報の生成を可能とする相対角度情報補完部48eとを有するモータ相対角度検出手段48を備え、前記モータ相対角度情報算出部は、前記操舵トルクに基づいてモータ相対角度変化量を算出し、算出したモータ相対角度変化量を前回サンプリング時のモータ相対角度に加算してモータ相対角度を算出する補完用相対角度情報演算部を有し、前記モータ角速度が零近傍の不感帯内にあるときに、前記補完用相対角度情報演算部で算出したモータ相対角度に基づいてモータ相対角度情報を演算する。
(もっと読む)
電動機駆動装置及び角度情報伝送処理方法
【課題】少ない信号線で且つ確実に角度情報を制御部に伝送することが可能となる電動機駆動装置及び角度情報伝送処理方法を提供する。
【解決手段】回転子の磁極位置を検出する位置検出器3を取り付けた同期電動機1と、この同期電動機を駆動する電力変換器2と、位置検出器3から得られる速度帰還と速度基準との速度偏差を減少させるように電流基準を生成する速度制御部5と、位置検出器3の位置信号から角度情報伝達手段を介して電流基準の位相を決定し、電力変換器2の出力電流が電流基準に追従するように電力変換器1を制御する電流制御部6とを備えた構成とする。角度情報伝達手段は、位置検出器3の位置信号から磁極位置に相当する位相パルス信号を生成するパルス変換手段54と、この位相パルス信号を受信し、PLL回路によって位相パルス信号に同期した状態で電流制御に用いる第1の位相信号を得る復調手段63とから成る。
(もっと読む)
モータ特性取得装置、モータ特性を用いる制御装置、およびパワーウィンド制御装置
【課題】マグネットの着磁誤差、回転検出センサの取り付け誤差を取り除きながらも、モータの回転周期の変化に鋭敏に反応できる装置を提供する。
【解決手段】モータの回転周期がエッジ間隔時間により細分化され、各エッジ検出時に、そのとき算出されたエッジ間隔時間とその1周期前に算出された対応するエッジ間隔時間との変化率が算出される。そして、設定された基準周期にその変化率を乗算することにより、モータの回転周期を算出する。
(もっと読む)
誘導電動機のベクトル制御のための方法および装置
本発明は誘導電動機のベクトル制御のための方法および装置に関する。本方法および本装置では、誘導電動機の実際トルクが求められ、求められた実際トルクが目標トルクと比較され、トルク偏差がある場合には、実際トルクを目標トルクに一致させるべく、磁束形成電流の目標値とトルク形成電流の目標値が変化させられる。実際トルクは誘導電動機の電力収支を用いて計算される。  (もっと読む)
(もっと読む)
回転機構の回転速度制御方法及び装置
【課題】負荷の変動に対して安定した回転速度の制御が可能となり、また小型化、小電力化することができ、回転数の安定化を図ることが可能となる回転機構の回転速度制御方法及び装置を提供する。
【解決手段】本発明は、任意に指定された目標回転速度でロータ2を駆動するエアタービン5を備えた回転機構の回転速度制御方法または装置において、前記ロータと同軸に、可動部である導体が配置された誘導モータ(7、8)と、前記誘導モータに対し、前記目標回転速度と一致した速度で磁界の進行波を発生させる波形の電流を入力する電流入力手段14と、を有し、前記誘導モータに対する前記電流入力手段からの電流の入力によって、前記エアタービンにより駆動されるロータの回転速度の変動を制御するように構成する。
(もっと読む)
1 - 6 / 6
[ Back to top ]