
Fターム[5H505LL16]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | 速度の検出 (1,620) | 速度検出器を用いないで速度を検出するもの (581) | 電気的変量の検出によるもの (374) | 逆起電圧検出によるもの (41)
Fターム[5H505LL16]の下位に属するFターム
巻線に電流が流れていないときのもの (11)
Fターム[5H505LL16]に分類される特許
1 - 20 / 30
同期電動機の制御システム
【課題】
同期電動機を120度通電方式から180度通電方式に切り替える際に、切換速度より小さい速度付近で120通電方式のでは電流位相が進んで力率が悪化する問題があった。停止状態から中高速域に至る広い速度範囲において、トルクショックの小さいシームレス駆動を行うことができる同期電動機の制御システムを提供する。
【解決手段】
同期電動機を120度通電方式で起動し、その後、180度通電方式に切り替えて駆動する制御システムで、120度通電方式から180度通電方式へ切り替える際に、120度通電中の力率を改善する力率改善手段を設け、この力率の改善された120度通電方式から180度通電方式に切り替えて同期電動機を駆動する。
(もっと読む)
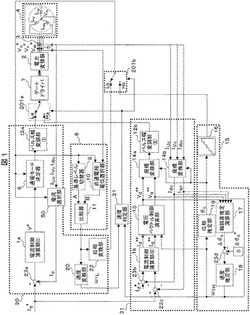
電力変換装置

【課題】電力変換器に対するエネルギ蓄積用のコンデンサが過電圧レベルを超えた際に、電力変換器の素子の損傷を防止しつつコンデンサの電荷を放電し、かつ小型、軽量化、コストダウンを図る。
【解決手段】コンデンサ5の過電圧検出に応じて過電圧検出手段20からの過電圧検出信号Sovで電力変換器3の動作停止、断流器4をオフし、同期機2の誘起電圧Vmよりも電圧検出手段10で検出されるコンデンサ5の充電電圧Vcが大きく、かつ過電圧検出信号Vovが出力されている場合に過電圧抑制手段30からの過電圧抑制信号Sccでスイッチング素子7をオンにしてコンデンサ5を放電する。また電流検出手段16で検出される同期機2を流れる電流Iuが基準値Imaxよりも大きい場合には、上記過電圧抑制信号Sccを強制的に遮断してスイッチング素子7をオフにしてコンデンサ5の放電を停止する。
(もっと読む)
モータ駆動装置およびモータ駆動方法
【課題】起動期間においてモータコイルへの電流供給効率を向上する。
【解決手段】モータ駆動装置は、モータが起動してからモータの回転数が目標回転数に達するまでの起動期間において、モータの回転数を検出し、当該検出した回転数に応じた制御信号(72)を出力する回転数検出手段(52)と、制御信号(72)に応じてPWM周波数を高くするPWM周波数変更手段(53)とを備えている。
(もっと読む)
洗濯機
【課題】運転の中断や停止が発生した場合でも、次回の運転開始時に、モータの出力トルクが不足することを回避できる洗濯機を提供する。
【解決手段】ドラムモータを構成するロータマグネットに着磁量を容易に変更可能なレベルの保磁力を有するアルニコ磁石を備え、制御回路が、インバータ回路を介して、アルニコ磁石の着磁量を変化させるように励磁電流を発生させ、洗濯機の運転を停止させる場合に(ステップS11)アルニコ磁石を増磁状態にする(ステップS12)。
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差である負荷角θLに応じたアシストトルクTAが発生する。一方、操舵トルクTがフィードバックされ、指示操舵トルクT*に操舵トルクTを近づけるように、加算角αが生成される。この加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。角速度演算部27は、三相検出電流IUVWのゼロクロス点間の間隔に基づいて、回転角速度ωを求める。補正部28は、指示操舵トルクT*の変化に応じて回転角速度ωに補正を施す。角速度適応制御部29は、回転角速度ωに基づき、PI制御部33のゲインを変更する。
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御する。
【解決手段】切換制御部40は、モータ3の回転角速度ωに応じて第1モードと第2モードとの間で制御モードを切り換える。第1モードでは、仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。一方、操舵トルクTがフィードバックされ、指示操舵トルクT*に操舵トルクTを近づけるように、加算角αが生成される。この加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。第2モードでは、検出操舵トルクTに応じて二相指示電流値Idq*が設定されるとともに、誘起電圧推定部27などの働きによってロータの回転角が推定される。この推定により求められた推定回転角θEを用いてモータ3の制御が行われる。
(もっと読む)
モータ制御装置及びドラム式洗濯機
【課題】モータの運転中に永久磁石が意図せずに減磁した場合でも、着磁状態の復帰を図ることができるモータ制御装置を提供する。
【解決手段】着磁制御部59は、減磁検出部58が、モータ1の運転中にアルニコ磁石が着磁された状態から減磁したことを検出すると、アルニコ磁石を再度増磁することで磁力を復帰させる。減磁検出部58は、誘起電圧指令決定部57がモータ1の運転状態に応じて決定すると誘起電圧指令Eq_refと、誘起電圧検出部56により検出された誘起電圧Eqとを比較し、前者に対して後者が所定の割合若しくは所定値だけ低下した場合に、アルニコ磁石9bの減磁を検出する。
(もっと読む)
圧縮機モータの駆動装置及びインバータの制御方法
【課題】圧縮機の振動を抑制するとともに広範囲の速度域で所望のトルクを得ること。
【解決手段】MPU8は、負荷トルクにモータ出力トルクを一致させるようにセンサレスベクトル制御を行っている期間において、モータ電流が該インバータ3を構成する素子の特性によって決定される電流閾値を超えた場合に、該モータ電流が該電流閾値以下となるまで、モータ回転数を増加させる。
(もっと読む)
モータ
【課題】正確な誘起電圧波形を利用してモータを駆動できる技術を提供する。
【解決手段】モータ100であって、N相(Nは2以上の整数)のコイル21A〜28A、21B〜28Bと、磁石31〜38と、前記コイルに加えられる駆動電圧波形のデータを前記コイルの相毎に格納している誘起電圧波形テーブル500と、前記誘起電圧波形テーブルを用いてモータを駆動する制御部200とを備える、モータ。
(もっと読む)
ブラシレスモータの制御装置および電動ステアリング装置
【課題】ブラシレスモータの回転角を迅速かつ精度良く推定しつつ、ブラシレスモータが脱調して過剰なトルク変動が生じたり、ブラシレスモータが停止してしまうことを防止し、運転者が操舵フィーリングに違和感を感じてしまうことを防止する。
【解決手段】ブラシレスモータの制御装置70は、モータ31の回転時にγ軸に発生するγ軸誘起電圧Eex・sinθeの二乗とδ軸に発生するδ軸誘起電圧Eex・cosθeの二乗との和に基づきモータ31の回転および停止を判定する停止判定器を備える。
(もっと読む)
電動機駆動装置
【課題】負荷が過大となった場合でもインバータの過電流停止を防止して電動機の駆動を維持することができる電動機駆動装置を提供する。
【解決手段】半導体スイッチング素子のブリッジ構成からなり、直流電力を所望の周波数、電圧の交流電力に変換して複数相の電動機にその電力を供給するインバータと、電動機の誘起電圧に対して所定の位相差の電動機電流が流れるようにインバータに駆動信号を与えるインバータ制御手段とを備え、インバータ制御手段は、電動機電流の最大値が予め設定された第1の電流設定値を超える場合には、第1の所定期間が経過するまで所定の時間変化率で位相差を減少させるものである。これにより、電動機の運転効率を高めて電動機電流を減らし、インバータの過電流停止を防止して電動機の駆動を維持することができる。
(もっと読む)
インバータ装置
【課題】瞬停や瞬時電圧低下時の制御不安定を解消し、脱調,過電流によるモータ停止を回避する技術を提供する。
【解決手段】本発明のインバータ装置は、商用電源(100)からの交流を直流に変換するコンバータ部(110)と、スイッチング素子をオン/オフすることによりコンバータ部(110)からの直流を交流に変換してモータ(130)に供給するインバータ部(120)と、インバータ部(120)のスイッチング素子のオン/オフを制御する制御部(200)と、コンバータ部(110)からインバータ部(120)に入力される直流電圧(Vdc)を検出する電圧検出部(140)とを備える。制御部(200)は、変調率演算部(210)の演算結果に応じて過変調PWM制御を行う第1のモード(ST207,ST208)を有しており、電圧検出部(140)の検出結果に応じて第1のモードの実行(ST207,ST208)/不実行(ST209,ST210)を切り替える。
(もっと読む)
モータ制御装置
【課題】モータのスムーズな駆動を阻害することなく、センサレス駆動方式と弱め磁束制御との併用を可能とする。
【解決手段】電流指令値生成部11は、電流指令値Idq*(d軸電流指令値およびq軸電流指令値)を生成する。位置推定部20は、モータ3の誘起電圧を推定し、それに基づいて、モータ3が備えるロータの推定回転位置θ^を求める。推定回転位置θ^は、回転座標系と固定座標系との間の座標変換を行う座標変換部14,18での演算に用いられる。電流指令値生成部11は、高速回転域では、モータ3のトルク出力の増加を図るために、d軸電流指令値を負の有意値として、弱め磁束制御を行う。ただし、位置推定部20におけるロータ回転位置推定の精度を保持するために必要な誘起電圧が確保できるように、d軸電流指令値に対して制限が加えられる。
(もっと読む)
モーター制御装置
【課題】
本発明が解決しようとする課題は、バッテリ電力の消費を抑制し、さらにモーター逆起電力によるECUの破壊を防止することである。
【解決手段】
ノーマルオープンとノーマルクローズの2接点を持つリレーを用い、ノーマルクローズ側の接続先を抵抗を介してモーター駆動回路部のゲート端子部へ接続する(図1)。ECUがスタンバイモードとなり、リレーがOFFしているときにモーターから発生した外力による逆起電力によりモーター駆動回路部のゲート端子部に電圧を発生させ、その電圧によってモーター駆動回路をONさせ、逆起電力を電流としてモーターへと戻してやることにより、サージエネルギーの大部分がモーターで消費させる。
(もっと読む)
電動機制御装置およびそれを用いた空気調和機
【課題】シンプルで低コストな回路構成で、電動機の欠相を検出すること。
【解決手段】電動機4の電流検出手段6と、前記電流検出手段6によって検出した電流値と電流基準値12とを比較し回転異常を判定する回転異常判定手段18と、前記回転異常判定手段11にて回転異常と判定した時前記電動機4の動作を停止させる保護動作手段14を備えるマイクロコンピュータで構成し、電動機4始動時より第1の所定時間経過後、前記回転異常判定手段18による回転異常判定が第2の所定時間継続した場合に、電動機4の欠相と判断し電動機4の動作を停止させることが可能となる。
(もっと読む)
ハイブリット自動車
【課題】磁極位置センサレス制御により起動から高速まで高効率、低騒音で永久磁石モータを駆動することができるハイブリット自動車を提供する。
【解決手段】ハイブリット自動車1は、動力源としての内燃機関と永久磁石モータ3とを搭載しており、この永久磁石モータ3を駆動するインバータ11は、永久磁石モータ3の回転数が零から前記内燃機関のアイドリング回転数未満の範囲では、永久磁石モータ3のロータ角度に応じて磁気回路中の磁気抵抗が変化することによりステータコイルのインダクタンスが変化することを利用してそのロータの磁極位置を推定する第1の磁極位置推定手段22の磁極位置推定値により制御され、アイドリング回転数以上のときには、永久磁石モータ3の回転中にステータコイルに発生する誘起電圧を利用してそのロータの磁極位置を推定する第2の磁極位置推定手段23の磁極位置推定値により制御される。
(もっと読む)
モータ駆動用インバータ制御装置
【課題】位置センサレスベクトル制御を適用したモータ駆動用インバータ制御装置において、推定演算された実回転数が実際のモータ回転数と一致しない場合でもモータ回転駆動状態を正しく判断し、異常なモータ回転駆動状態でモータ回転駆動が継続することを防止する。
【解決手段】起動直後を除き、モータ回転数より導出される推定誘起電圧値および指示電流値の上下限値の少なくとも一方を超過する場合にモータ回転駆動状態が無回転である、あるいは実回転数推定演算部からの推定演算結果が所定の上下限値の少なくとも一方を超過する場合にモータが異常回転であると判断するモータ回転判定部を備え、異常なモータ回転駆動状態での運転継続を防止する。
(もっと読む)
多相回転機の制御装置
【課題】多相回転機を流れる相電流のゼロクロスタイミングと相電流の変化量のゼロクロスタイミングとを一致させる制御を行うべく多相回転機に対する指令電圧を操作するに際し、力行制御時及び回生制御時の双方において指令電圧を適切に設定することが困難なこと。
【解決手段】相電流のゼロクロスタイミング(Φ(I=0))と相電流の変化量のゼロクロスタイミング(Φ(dI/dt=0)とを一致させるべく、指令電圧の位相φを操作する。ここで、力行制御時(ステップS98)と、回生制御時(ステップS100)とで、指令電圧の位相φを設定するためのゲインの極性を逆とする。
(もっと読む)
電動機制御方法およびその装置
【課題】電動機のロータ位置を、ロータリーエンコーダなどを用いることなく、電圧、電流の検出値および電動機の機器定数から検出するに当たって、機器定数を同定することにより、ロータ位置検出精度を高める。
【解決手段】誤差削減部19は、圧縮機6のトルク変動量の予め設定された大きさを有しており、振幅調整部15からのトルク変動量出力とこの設定値を比較してLq補正指令を出力する。位置検出部12′は、Lq補正指令に応答してLqを補正し、補正後のLqを用いてロータ位置、角速度を出力する。圧縮機6のトルク変動量は圧縮機6の構造によりほぼ定まるため、圧縮機6の持つトルク変動量と制御が出力するトルク変動の大きさを比較することによってLq補正指令を出力し、位置検出部12′におけるLqの補正を実現する。
(もっと読む)
遠心力ポンプの送出流体の温度取得方法
【課題】温度センサを使用することなく、安価で取り扱いが容易なポンプ送出流体の温度取得方法、を提供することである。
【解決手段】流体で満たされた容器内でロータが回転する永久磁石モータによって駆動される遠心力ポンプの前記送出流体の温度取得方法であって、ロータ温度Tmを永久磁石モータの電気的変数に基づいて評価し、送出流体の温度をロータ温度Tmに基づいて決定する。この方法は、永久磁石同期モータによって駆動される循環ポンプについて、送出流体の温度測定をセンサを用いないで可能にする。
(もっと読む)
1 - 20 / 30
[ Back to top ]