
Fターム[5H505LL27]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | 電気的変量の検出 (3,888) | 力率 (9)
Fターム[5H505LL27]に分類される特許
1 - 9 / 9
空気調和機
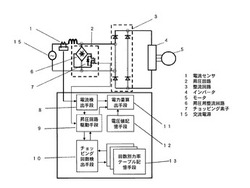
【課題】電力量を正確に測定することができる空気調和機を提供すること。
【解決手段】本発明の空気調和機は、交流電源から直流電源に変換する整流回路と、モータ負荷を駆動するインバータと、チョッピング素子と昇圧用整流回路からなる昇圧回路と、交流電流の電流値を測定する電流センサと、昇圧回路のチョッピング素子の半周期に対するチョッピング回数をカウントするチョッピング回数検出手段と、電流センサで検出する電流値とチョッピング回数から力率を選択し出力する回数別力率テーブル記憶手段とを備え、回数別力率テーブル記憶手段から出力される力率を用いて電力量を算出する。
(もっと読む)
ACライン電圧の調節器および制御器
【課題】本発明の目的は、誘導電動機などのAC負荷に提供されるAC電力を調整し、調節し、制御するデバイスを提供することである。
【解決手段】電圧および電力の調節・制御デバイスが、ACライン電源(11、12)および単相誘導電動機などの無効負荷(13)と直列に使用され得る。本デバイスは、AC負荷によって反射される電力の一部を吸収し、印加電力のレベルおよび位相を補足し、補正するための合成電力波を生成するように動作する。本デバイスは、1対の電力用コンデンサ(C1、C2)、およびそれぞれダイオード(D1、D2)と並列な1対の電子スイッチデバイス(Q1、Q2)を用いる。ライン電圧およびタイミング(例えばゼロ交差)に基づいて、ゲート信号またはコマンド信号(図2A、2B、2C)が生成される。コマンド信号の位相またはタイミングは、標準モードもしくは非昇圧モード、電圧昇圧モード、または電圧低下モードについて選択される。コンデンサは負荷と直列とみなされ、負荷に対する力率を改善する。このデバイスの一変形は、太陽電池アレイまたは他のローカル電源と併用され得る。
(もっと読む)
交流電動機の監視装置

【課題】電流振幅の影響を受け難く、検出精度の高い交流電動機の監視装置を得る。
【解決手段】共通の交流電源1に並列接続された複数の交流電動機3の異常を監視する監視装置であって、電圧検出手段6と、個別電流検出手段5と、全電流検出手段4と、電圧検出手段6、個別電流検出手段5及び全電流検出手段4の出力から各々の個別の電力及び全体の電力を演算する電力演算手段74と、電圧検出手段4、個別電流検出手段5及び全電流検出手段4の出力からそれぞれの実効値を演算する実効値演算手段75と、電力演算手段74と実効値演算手段75の出力から、全電流と前記個別電流の各々の位相差を演算する位相差演算手段77とで構成する。各々の位相差が交流電動機3によって定められた異常判定レベルを超えたとき、交流電動機3が異常であると判定する。
(もっと読む)
インバータ装置
【課題】3相電動機の電流検出に用いるシャント抵抗の数を減らしつつ、正弦波駆動に必要な電流検知は行い、部品点数が少なく、低コストのインバータ装置を実現する。
【解決手段】シャント抵抗45と駆動回路46の間に接続したアナログ回路47は、ほぼ電気角60度毎にボトムを有するアナログ電圧を出力し、3相電動機30を力率角の絶対値30度以下で運転することにより、簡単な構成で電流検知を行いながらの正弦波駆動が可能となる。
(もっと読む)
モータ制御装置およびその方法
【課題】空気調和機においてオイルセパレータを取り除くことにより、圧縮機の起動時における要求トルクが増加した場合であっても、確実に圧縮機を起動させる。
【解決手段】圧縮機を駆動するモータ7を制御するモータ制御装置1であって、モータ7に供給する電圧と電流との位相差である力率角を設定する力率角設定部2と、力率角設定部2によって設定された力率角に基づいて、モータ7に供給する電圧指令値を決定する電圧指令演算部4とを備え、力率角設定部2は、モータの起動時において、モータの起動に必要となるトルクと電流制限値とから決定される初期力率角を力率角として設定する。
(もっと読む)
インバータ制御装置並びに電動機駆動装置並びに空気調和装置
【課題】電動機の回転周波数よりも低い周波数成分で発生する電動機電流の脈動を抑制し、電源周波数とインバータ駆動周波数の干渉で発生するビート脈動が起こらない起動運転時や低回転運転時や変調率が1よりも小さくなるような運転域を含む運転範囲全域で圧縮機の安定駆動を実現し、圧縮機に異常が発生した場合でも電流脈動を増幅させることなく、安定に停止できるインバータ制御装置並びに電動機駆動装置並びに空気調和装置を得る。
【解決手段】切替手段13は、圧縮機の回転数よりも低い周波数成分で脈動する圧縮機入力電流を抑制し、圧縮機を安定駆動するための電流脈動抑制手段12の出力を、インバータ周波数が第1の閾値よりも大きいという条件、圧縮機入力力率が第2の閾値よりも大きいという条件、変調率が第3の閾値よりも大きいという条件を組み合わせた場合にのみ有効とする。
(もっと読む)
位相検出方法、位相検出装置、同期モータの制御方法、および同期モータの制御装置
【課題】簡易な構成で精度の高いベクトル位相をリアルタイムで検出すること。
【解決手段】入力された3相信号の各相の信号振幅の大小関係が異なる連続した6つの区間のうちのいずれの区間であるかを判定し、この判定された区間に対応して該区間内の各相間で所定の減算処理を行い、この減算処理結果を用いて該区間内で正規化した正規化振幅値を求め、この求められた正規化振幅値を、判定された区間に対応させて所定相を基準とする1周期のベクトル位相に換算して出力するようにしている。
(もっと読む)
ポンプ装置とこれを用いた食器洗い機
【課題】誘導電動機を用い、低コストの泡噛み判定を行う。
【解決手段】進相コンデンサ12を直列接続した巻線31を含む複数の巻線を有する誘導電動機11を有し、泡噛み判定手段18は、電圧検知回路15に対して位相が変化する電流検知回路17からの信号を受けて泡噛みを判定することにより、回転センサが不要で、泡噛みが適切に検知できる低コストのポンプ装置を実現する。
(もっと読む)
電気モータ制御方法、システム、および装置
【課題】本発明は、モータの力率制御システムおよび方法を提供する。
【解決手段】位相検出手段は、電源装置の線間電圧と、モータのモータ端子電圧を用いる。位相検出手段の出力部は、モータ電流のゼロ交差と、線間電圧のゼロ交差とに同期する。位相検出手段の出力部と、整流手段ドライバとの間に接続されるデジタルマイクロプロセッサは、モータ電圧の位相がゼロ交差する第1の時間と、モータ電流の位相がゼロ交差する第2の時間と、を検知する。デジタルマイクロプロセッサは、第1の時間と第2の時間との時間差を決定し、モータの位相遅れを算出するためにその時間差を使用する。デジタルマイクロプロセッサは、整流手段の導通時間を算出するために位相遅れを使用して、モータへの効率的な電気の供給を命じる。
(もっと読む)
1 - 9 / 9
[ Back to top ]