
Fターム[5H530CF12]の内容
Fターム[5H530CF12]に分類される特許
1 - 7 / 7
モータ駆動装置及びこれを用いた電気機器
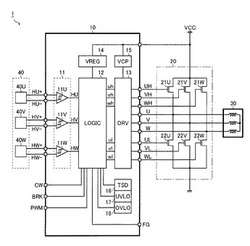
【課題】モータの急減速時や正転/逆転切換時における電源電圧の上昇を抑制する。
【解決手段】モータ駆動装置10は、電源端とモータ30との間に接続された上側トランジスタ21U、21V、21W及びモータ30と接地端との間に接続された下側トランジスタ22U、22V、22W各々のオン/オフ制御を行うロジック回路12と、電源端に印加される電源電圧VCCと所定の保護設定値との比較結果に応じた過電圧保護信号を生成してロジック回路12に送出する過電圧保護回路18とを有し、ロジック回路12は、電源電圧VCCが保護設定値を上回ったときに上側トランジスタ21U、21V、21Wをオフとして下側トランジスタ22U、22V、22Wをオンとする。
(もっと読む)
ユニバーサルモータ用の制動装置
ユニバーサルモータ用の電気力学的制動装置が提案される。この電気力学的制動装置では、制動動作中に界磁巻線に電源網から給電され、電機子が短絡される。そして制動過程が制御電子回路によって実施され、これによりブラシ磨耗が比較的小さい良好な制動が達成される。このような電気力学的制動装置は、危険な工具が装着された電子工具装置に使用される。  (もっと読む)
(もっと読む)
永久磁石同期モータの駆動装置、空気調和装置、換気扇の駆動装置、洗濯機、自動車及び車両

【課題】永久磁石同期モータが強制的に回転させられた場合に生じる回生電圧を部品点数の増加なしに抑制して低コスト化できる永久磁石同期モータの駆動装置を得ることを目的とする。
【解決手段】直流電源10の直流電圧を入力とし、永久磁石同期モータ30に電圧を出力するインバータ40と、インバータ40に入力される直流電圧を検出する直流電圧検出手段90と、インバータ40が出力する電圧を制御するインバータ制御手段50を備え、インバータ制御手段50は、直流電圧検出手段90が検出する回生時の出力に基づいてインバータ40と永久磁石同期モータ30の線間を開放又は短絡の少なくともいずれかを行うようにインバータを制御するようにした。
(もっと読む)
車両駆動装置及び車両駆動装置における抵抗器の断線検知方法
【課題】回路規模を大きくすることなく、抵抗器の断線の発生を検出する。
【解決手段】主発電機2の出力は整流器3と平滑用のコンデンサ4で直流に変換され、インバータ5で直流を交流に変換して交流電動機6を駆動する。整流器3の出力には、スイッチ9を介して並列に接続された抵抗器10a、10bが設けられる。さらにスイッチ9に流れる電流を検出する電流検出器11と、コンデンサ4の両端電圧を検出する電圧検出器12を設ける。そして、電流検出器11で検出された電流値をローパスフィルタ13に供給して低周波成分を取り出し、電圧検出器12によって検出された信号を、ローパスフィルタ13の出力信号によって除算器14で除算する。さらに除算器14の出力に対して、スイッチ9のオンデューティを検出した値16を乗算器15で乗算する。この乗算器15の出力は、基準電圧発生器17が発生する基準電圧と比較器18で比較される。
(もっと読む)
ダイナミックブレーキの過負荷検出装置
【課題】モータ制御装置の電源オン、オフに関わらずダイナミックブレーキの過負荷を検出できる過負荷検出装置を提供する。
【解決手段】過負荷検出装置は、ダイナミックブレーキ回路のブレーキ抵抗器12にダイオード1と抵抗器2を介して並列に接続されたコンデンサ3と、このコンデンサ3に並列接続され、充電状態を監視する過負荷検出回路4とを備えている。過負荷検出回路4は、抵抗器4b、抵抗器4c、フォトカプラ4d、抵抗器4eで構成しており、コンデンサ3の充電電圧が、所定の基準値を超えると外部端子4aに過負荷検出信号を出力する。
(もっと読む)
固定装置におけるモータ制御
【課題】 モータにより駆動される移動部を所定の位置に固定する際に、移動部を移動させる駆動機構のクリープを抑制する技術を提供する。
【解決手段】 移動部がストッパと接触する固定位置に移動部を保持する固定装置は、直流モータの回転をウォームギアを介して移動部に伝達して移動部を移動させる駆動部と、直流モータへの供給電流を制御するモータ制御部と、を備えている。このモータ制御部は、移動部がストッパと接触した後に駆動部をストッパの方向に駆動する所定の移動部固定電流Ieを直流モータに供給し、その後、移動部固定電流Ieと極性が反対で絶対値が移動部固定電流Ieよりも小さい応力緩和電流Irを直流モータに供給する。
(もっと読む)
電動車両の駆動制御装置
【課題】 電動車両に搭載されるアクセルセンサが断線等で異常を起こした時、より安全に車両停止、エラーの検出を行う。
【解決手段】アクセルセンサ14からの出力信号に急激な変化があった場合、アクセルセンサ値を所定期間T2、0レベルに置き換え、モータ5を停止する。期間T2の間もアクセルセンサの出力をモニタリングし、変化がない場合、期間T2が過ぎるまで0レベル置き換えを維持する。T2経過後はアクセルセンサ14の出力を読み込み、大きな変化があった時、あるいは0レベルに戻った時、モータ5を駆動させるようにして、誤検出でのエラー判定を回避する。
(もっと読む)
1 - 7 / 7
[ Back to top ]