
Fターム[5H560DA16]の内容
無整流子電動機の制御 (40,007) | 位置検出(回転子) (3,428) | 検出系が複数組あるもの (25)
Fターム[5H560DA16]に分類される特許
1 - 20 / 25
モータ駆動装置、シート搬送装置及び画像形成装置
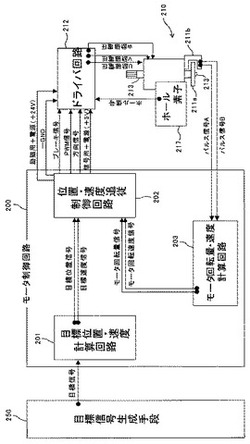
【課題】ドライバ回路に入力される回転センシング信号へのノイズの混入に起因するモータ回転の不安定化と、モータ起動時のギヤ歯の衝突に起因するギヤの寿命低下とを抑えつつ、搬送モータによって第1搬送ローラ16aを迅速に加速する。
【解決手段】DCブラシレスモータからなる搬送モータ210の回転量を検知するモータエンコーダ211と、ドライバ回路212とを搬送モータ210に搭載し、モータ起動時にて、搬送モータ210の回転速度を第1加速特性で加速させるように搬送モータ210を駆動しながら、モータエンコーダ211による検知結果と第1加速特性とに基づいて把握したタイミングが到来した後に、搬送モータ210の回転速度を第1加速特性よりも加速性に優れた第2加速特性で加速させるように搬送モータ210を駆動する加速度変更処理を実施するようにモータ制御回路200を構成した。
(もっと読む)
車両用操舵装置

【課題】代替モータ回転角の検出に用いる回転角センサの分解能をモータ回転角に換算した値が90°〜180°の範囲内にある場合であっても、安定的に代替モータ回転角を用いたモータ制御を実行することのできる車両用操舵装置を提供すること。
【解決手段】マイコンは、モータ回転角センサにより検出されるモータ回転角に異常が検出された場合には、当該モータ回転角に代えて、ステアリングセンサの検出値に基づく代替モータ回転角を用いた代替制御を実行する。そして、マイコンは、代替制御に基づき換算分解能Δθ0に対応する位相遅れが生じたq軸電流指令値Iq*のq軸電流成分(第1成分Iq1)を打ち消すd軸電流指令値Id*を演算する。
(もっと読む)
モータ駆動制御装置及び画像形成装置
【課題】素早くかつ安定にモータを起動することができるモータ駆動制御装置を提供する。
【解決手段】モータ10を停止状態から起動するときは第1の駆動方式である矩形波駆動により回転駆動し、回転中は矩形波駆動または第2の駆動方式である正弦波駆動を切り替えて回転駆動する。これにより、回転位置が正確に得られない起動時は分解能の低い回転位置情報だけでも高トルクを発生可能な駆動方式でモータを駆動し、起動して高分解能の回転位置が得られるようになってから、正弦波駆動に駆動方式を切り替えることができる。そのため、素早くかつ安定にモータを起動することができる。
(もっと読む)
モータを備えた機器
【課題】DCブラシレスモータを高効率に駆動可能な機器を提供する。
【解決手段】機器は、キャリッジ1とベルト2とCRモータ4とホール素子6とエンコーダ8とMPU9Aとを含む。リニアエンコーダ8は、キャリッジ1の位置を検出する。ベルト2は、キャリッジ1と結合されている。CRモータ4は、ベルト2を駆動してキャリッジ1を走査させる。ホール素子6は、CRモータ4内のロータ磁極が位置する存在領域を検出する。MPU9Aは、ホール素子6の検出結果とリニアエンコーダ8の検出結果とに従ってCRモータ4内の各コイルへの通電を制御する。
(もっと読む)
モータ駆動装置
【課題】磁極位置信号に関する初期設定を自動で設定できるモータ駆動装置を提供する。
【解決手段】トルク指令生成器1と、磁極位置設定器2と、検出方向設定器としてのCS信号方向設定器3と、検出方向切替器4と、電流制御器5とを備えている。本モータ駆動装置が、同期モータ30を回転駆動するように駆動制御することによりモータ30の回転子が回転する。また、モータ30には磁極センサ31が取り付けられている。磁極センサ31は、モータ30の回転動作に応じて、回転子の磁極の位置に応じた磁極位置信号を本モータ駆動装置へと出力する。
(もっと読む)
駆動装置、駆動方法、及び装置
【課題】簡易な構成でありながら位置決め精度を高められる駆動装置、駆動方法、及び装置を提供する。
【解決手段】駆動装置(1a)は、回転駆動する駆動部(10)と、駆動部(10)の駆動出力軸の回転角度位置を検出し第1の位置情報を生成する第1の位置検出器(31)と、駆動部(10)の駆動出力軸に接続された減速機(20)と、減速機(20)の減速出力軸の回転角度位置を検出し第2の位置情報を生成する第2の位置検出器(32)と、第1の位置情報と前記第2の位置情報とを選択的に用いて駆動部(10)を制御する制御部(100a)と、を備える。
(もっと読む)
電気機械の作動のための方法および駆動装置
本発明は電気機械の作動のための方法および駆動装置に関している。この電気機械は、ローターとステーターを有しており、駆動装置は駆動ユニット(2)を有している。本発明によれば、ステーターに対するローターの角度位置が、前記駆動ユニット(2)に対応付けされている回転角センサ(4)を確定される。さらに本発明の対象は駆動装置にも関している。  (もっと読む)
(もっと読む)
洗濯機
【課題】運転の中断や停止が発生した場合でも、次回の運転開始時に、モータの出力トルクが不足することを回避できる洗濯機を提供する。
【解決手段】ドラムモータを構成するロータマグネットに着磁量を容易に変更可能なレベルの保磁力を有するアルニコ磁石を備え、制御回路が、インバータ回路を介して、アルニコ磁石の着磁量を変化させるように励磁電流を発生させ、洗濯機の運転を停止させる場合に(ステップS11)アルニコ磁石を増磁状態にする(ステップS12)。
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御する。
【解決手段】切換制御部40は、モータ3の回転角速度ωに応じて第1モードと第2モードとの間で制御モードを切り換える。第1モードでは、仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。一方、操舵トルクTがフィードバックされ、指示操舵トルクT*に操舵トルクTを近づけるように、加算角αが生成される。この加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。第2モードでは、検出操舵トルクTに応じて二相指示電流値Idq*が設定されるとともに、誘起電圧推定部27などの働きによってロータの回転角が推定される。この推定により求められた推定回転角θEを用いてモータ3の制御が行われる。
(もっと読む)
モータ制御装置
【課題】低速域用位置検出と高速域用位置検出との切換えを適切に行うことにより、正確なロータ位置の推定を可能とし、モータを効率的に制御できるようにする。
【解決手段】位置推定部21は、電動モータ3の回転位置を求める。位置推定部21は、低速域用位置推定部41と、高速域用位置推定部42と、切換判定部43と、切換部44とを備えている。低速域用位置推定部41は、電動モータ3が低速域で回転しているときに低速推定回転位置θ^Lを生成する。高速域用位置推定部42は、電動モータ3が高速域で回転しているときに高速推定回転位置θ^Hを生成する。切換部44は、低速推定回転位置θ^Lおよび高速推定回転位置θ^Hのいずれかを選択し、推定回転位置θ^として出力する。切換判定部43は、低速域と高速域との重複領域である切換速度領域において、回転速度ωと回転加速度αとの符号の異同に応じて、切換部44に切換えを指令する。
(もっと読む)
車両用モータ制御装置及びその方法
【課題】簡易なセンサでも最適にモータ制御を行う。
【解決手段】モータ制御装置は、センサを用いることなくモータの回転角を推定してモータを制御するセンサレス制御とセンサの検出値を用いるモータ制御とで相互に切り換わった場合(ステップS11)、センサレス制御の制御域とセンサの検出値を用いるモータ制御の制御域との相互の切り換え領域で、センサレス制御で推定したモータの回転角とセンサの検出値から得たモータ回転角とを用いてモータを制御する(ステップS12、コンバインモード)。
(もっと読む)
電動パワーステアリング制御装置
【課題】モータ回転角センサを持たないブラシレスモータを、2種類以上の方式で推定されるモータ回転角度の推定値を用いて制御する電動パワーステアリング制御装置を得る。
【解決手段】電流指令生成手段11、各相の電圧指令とモータ回転角度信号及びモータ回転角速度信号を算出する電流制御手段12を備えた電動パワーステアリング制御装置であって、電流指令生成手段11は、ダンピング、慣性、摩擦の各補償器を有し、補償器のいずれか1つ以上の補償電流指令とアシスト電流指令とに応じて電流指令を算出し、電流制御手段12は、2つの異なるモータ回転角推定手段を有し、モータ回転角速度に基づきいずれかのモータ回転角度推定手段の出力を選択してモータ回転角度信号を算出し、算出されたモータ回転角度信号とそれを微分して得られるモータ回転角速度信号とを、いずれかの補償器へのモータ回転角度信号またはモータ回転角速度信号として与える。
(もっと読む)
モータ制御装置
【課題】回転角の推定演算を必要時にのみ行うことができ、しかも、演算開始後速やかに妥当な推定回転角を得ることができ、これによって、演算負荷の低減を図りながらモータを適切に制御することができるモータ制御装置を提供する。
【解決手段】センサ故障判定部25は、レゾルバ2の故障の有無を判定する。レゾルバ2に故障が生じていない通常時は、レゾルバ2が検出する検出回転角θSを用いてモータ1が制御される。この間、回転角推定部31は推定演算を停止している。レゾルバ2の故障が発生すると、探査電圧発生部26から探査電圧指令値が発生され、モータ1のステータは探査磁界を形成する。このときのトルクセンサ7の出力に基づいて、初期値決定部24が回転角推定部31の内部変数の初期値を決定する。この初期値を用いて、回転角推定部31が推定回転角θEを求める。この推定回転角θEを用いてモータ1が制御される。
(もっと読む)
モータ制御装置
【課題】コストの大幅な増加を伴うことなく、回転角検出手段の故障時に正確に推定された回転角を用いてモータを適切に駆動することができるモータ制御装置を提供する。
【解決手段】レゾルバ2に故障が生じていない通常時はレゾルバ2が検出する検出回転角θSを用いてモータ1が制御される。レゾルバ2に故障が生じたときは、回転角推定部31が演算する推定回転角θEを用いてモータ1が制御される。レゾルバ2が正常なときに、検出回転角θSから求めた回転角速度ωから検出誘起電圧ESαβが演算される。また、二相電圧指令値Vαβおよび二相検出電流Iαβに基づいて推定誘起電圧EEαβが演算される。これらの比較に基づき、推定誘起電圧EEαβを補正するための補正値Cαβが生成され、補正値記憶部30に書き込まれる。回転角推定部31は、推定誘起電圧EEαβを補正値Cαβで補正し、この補正後の推定誘起電圧を用いて推定回転角θEを求める。
(もっと読む)
モータ制御装置
【課題】モータの回転位置情報が異常であっても、継続して確実にモータを駆動することができるモータ制御装置を提供する。
【解決手段】モータ制御装置1は、モータM1を制御するための装置である。モータM1には、相数に対応した回転子の回転位置情報を検出する回転位置検出装置S1が設けられている。モータ制御装置1は、電力供給回路10と、誘起電圧検出回路11と、マイクロコンピュータ12とから構成されている。回転位置検出装置S1によって検出された回転位置情報が異常であるとき、マイクロコンピュータ12は、誘起電圧検出回路11の検出結果に基づいて回転位置情報を求め、求めた回転位置情報に基づいて電力供給回路10を制御する。これにより、回転位置検出装置S1の回転位置情報が異常になっても、継続して確実にモータを制御することができる。
(もっと読む)
モータ制御装置
【課題】磁気センサの出力信号とロータ回転位置推定演算とを組み合わせることによって、コストの削減を図りながら精度の高いロータ回転位置を得ることができ、それによって、モータの制御を適切に行うことができるモータ制御装置を提供する。
【解決手段】ホール素子20は、モータ3のロータに取り付けられた磁石の回転軸方向への漏れ磁束を検出し、ロータの回転位置に応じた信号を出力する。位置推定部21は二相検出電流Iαβおよび二相指示電圧Vαβに基づいてロータの回転位置を推定する。位置補正部30は、ホール素子20の出力信号から特定される2つの回転位置候補のうち、位置推定部21による推定結果に近い方を選択し、制御回転位置θ^として出力する。
(もっと読む)
電動パワーステアリング装置
【課題】回転角を精度よく推定できない状況においても、継続してステアリングホイールの操舵を補助することができる電動パワーステアリング装置を提供する。
【解決手段】本発明の電動パワーステアリング装置1は、トルクセンサ2と、ブラシレスモータ3と、制御装置5とを備えている。ブラシレスモータ3は、回転角センサ30を有している。制御装置5は、回転角推定部52と、制御部53とを有している。回転角推定部52は、ブラシレスモータ3のコイルの誘起電圧に基づいてロータの回転角を推定する。制御部53は、回転角センサ30が故障し、かつ、コイルの誘起電圧最大値が2.4V未満のとき、トルクセンサ2の検出した操舵方向を判定し、ブラシレスモータ3内に、操舵方向に対応した回転方向に回転磁界が発生するように制御する。これにより、回転角を精度よく推定できない状況においても、継続してステアリングホイールの操舵を補助することができる。
(もっと読む)
ブラシレスモータ
【課題】ブラシレスモータにおいて、各相の駆動信号の位相をより整合させることのできる技術を提供する。
【解決手段】本発明によるブラシレスモータは、m相の電磁コイル群のうちのn相(nは2以上m未満の整数)の電磁コイル群にのみn個の磁気センサが実装され、残りの(m−n)相の電磁コイル群には磁気センサが実装されていない。駆動制御回路は、磁気センサが実装されているn相の電磁コイル群のためのn組の駆動信号を、n個の磁気センサのそれぞれのセンサ出力を用いて生成する。また、駆動制御回路は、磁気センサが実装されていない(m−n)相の電磁コイル群のための(m−n)組の駆動信号を、n個の磁気センサのセンサ出力のうちの1つ以上をそれぞれ用いて生成する。
(もっと読む)
電動パワーステアリング装置
【課題】操舵補助用のブラシレスモータの最適なロータ位置推定アルゴリズムを選択することができる電動パワーステアリング装置の提供。
【解決手段】操舵補助用のブラシレスモータに高周波電圧(又は高周波電流)を注入し、その応答電流(又は応答電圧)に基づき、ブラシレスモータのロータ位置を推定する第1推定手段(S8)と、検出した相電圧及び相電流に基づき、ロータ位置を推定する第2推定手段(S6)と、トルクセンサが検出した操舵トルク(S2)が、閾値以上であるか否かを判定する判定手段(S4)とを備え、判定手段が閾値以上でないと判定したときは、第1推定手段(S8)が推定したロータ位置に、判定手段が閾値以上であると判定したときは、第2推定手段(S6)が推定したロータ位置に基づき、ブラシレスモータを駆動する構成である。
(もっと読む)
電気自動車運転駆動装置
【課題】電気自動車の運転にインバータ駆動のブラシレス電動機を用いる運転駆動装置において、本来なら二重化すべき回転角位置検出部のコストを低減しかつ回転角位置検出の際の故障判定を正しく行い得るようにする。
【解決手段】回転角位置検出部を用いたブラシレス電動機の実回転角位置信号と、故障時に備えるいわゆるセンサレス制御手段からの推定回転角位置信号とを照合するようにした。
(もっと読む)
1 - 20 / 25
[ Back to top ]