
Fターム[5H571GG06]の内容
Fターム[5H571GG06]に分類される特許
1 - 5 / 5
モータ速度制御装置、及び画像形成装置
【課題】安価な構成で、基準パルスと検出パルスの位相差を広範囲、且つ精密に検出でき、外乱に対しても同期はずれの生じる危険性を少なくして、精密なPLL制御が可能な速度制御装置を提供する。
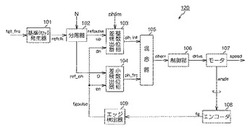
【解決手段】本発明のモータ速度制御装置120は、tgt_frqに基づくrefclkを出力する基準クロック発生器101と、モータ107の所定回転角度ごとに所定数のfgを出力するエンコーダ108と、refpulseを出力する分周器102と、整数位相差ph_intとして出力する整数位相差検出器103と、refpulseのエッジとfgpulseとの時間差を検出してrefclk単位で計測してph_frcとして出力する小数位相差検出器104と、ph_intとph_frcを混合器105で所定の比率で加算してpherrとし、pherrに基づいてモータ107を駆動制御する制御部106と、を備えて構成されている。
(もっと読む)
モータ制御装置

【課題】最大トルク制御等を得るための演算用パラメータの調整の容易化を実現すると共に演算量の削減を実現するモータ制御装置を提供することを目的とする。
【解決手段】d−q軸に対応する制御上の推定軸をγ―δ軸とし、突極性を有するモータ1のq軸インダクタンスに対応する値を演算用パラメータとして用いてモータ1の回転子位置を推定する推定器20と、推定された前記回転子位置に基づいてモータ1を制御する制御部と、を備える。推定器20は、モータ1の実際のq軸インダクタンスと実際のd軸インダクタンスの間の値を前記演算用パラメータの値として採用した上で前記回転子位置の推定を行うことによって、d軸とγ軸との間にずれを生じさせ、前記制御部は、モータ1に供給するモータ電流のδ軸成分iδの値に関係なく前記モータ電流のγ軸成分iγがゼロまたはゼロ近傍の所定値に保たれるように、モータ1を制御する。
(もっと読む)
ミシンのモータ制御装置
【課題】モータの低速回転時のトルクリップルによる振動を抑制する。
【解決手段】ミシンモータ11をオン−オフ制御する半導体スイッチング手段と、交流電源の電源電圧のゼロクロスを検出するゼロクロス検出手段19と、ミシンモータの速度を設定する速度設定手段18,16と、ミシンモータの現在速度を検出する速度検出手段12と、設定速度と現在速度との速度偏差に基づいて電源電圧正弦波形に対する電力供給のオン期間を定めるモータ出力制御手段40と、モータ出力制御手段の定めるオン期間に基づいて半導体スイッチング手段のオン−オフ動作させる半導体駆動手段30とを備えるミシンのモータ制御装置10において、モータ出力制御手段は、ゼロクロスの検出間隔を一周期とした場合に、当該一周期の前端側と後端側とに二分して前記オン期間を定める。
(もっと読む)
モータ制御装置とその制御方法とその適用機械システム
【課題】簡単な構成で複数の振動を抑制することができるモータ制御装置とその制御方法とその適用機械システムを提供する。
【解決手段】位置指令とモータ位置に基づいて速度指令を生成する位置制御部(1)と、速度指令とモータ速度に基づいてトルク指令を生成する速度制御部(2)と、トルク指令に基づいてモータを駆動するモータ駆動部(3)と、を備え、1〜M次の振動モードをもつN個のリンクからなる機械を駆動するモータ制御装置において、N個のリンクの先端または振動節部に取り付けられたN個の加速度センサの加速度信号に係数を乗じて第1補正信号を生成するN個の係数部(6)と、第1補正信号を位相補正して第2補正信号を生成するN個の位相補正部(7)と、第2補正信号を速度指令から減算し新たな速度指令を生成する加減算部(5)と、を備えた。
(もっと読む)
モーターの回転制御回路、これを駆動源として利用した駆動体
【解決課題】 回路構成が複雑でなく、位相差信号に対する応答性が良好で、かつ、熱により信号変動が小さいモーター制御回路を提供する。
【解決課題】 モーターの回転制御回路において、前記モーターのPWM制御回路と、前記モーターの回転速度センサと、基準信号発生回路10と、位相比較回路と、前記モーターの検出回転速度信号を分周する分周器とを備え、この分周器からの信号と前記基準信号に基づく信号との位相差を位相比較器で求め、この位相差信号を前記PWM制御回路に供給するように構成した。  (もっと読む)
(もっと読む)
1 - 5 / 5
[ Back to top ]