
Fターム[5H680BC10]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 用途 (1,055) | 微動載置台、微動ステージ (143)
Fターム[5H680BC10]に分類される特許
1 - 20 / 143
圧電モーター、駆動装置、電子部品搬送装置、電子部品検査装置、印刷装置、ロボットハンド、およびロボット
圧電モーター、駆動装置、電子部品搬送装置、電子部品検査装置、ロボットおよびプリンター
圧電モーター、駆動装置、電子部品検査装置、電子部品搬送装置、印刷装置、ロボットハンド、およびロボット
駆動装置、電子部品搬送装置、電子部品検査装置、ロボットハンド、及びロボット
圧電モーター、駆動装置、電子部品検査装置、電子部品搬送装置、印刷装置、ロボットハンド、およびロボット
圧電モーター、駆動装置、電子部品搬送装置、電子部品検査装置、印刷装置、ロボットハンド、およびロボット
アクチュエーター、ロボットハンド、ロボット、電子部品搬送装置、電子部品検査装置およびプリンター
圧電モーター、駆動装置、ロボット、電子部品搬送装置、電子部品検査装置、プリンター
アクチュエーター、ロボットハンド、ロボット、電子部品搬送装置、電子部品検査装置およびプリンター
圧電モーター、駆動装置、電子部品検査装置、電子部品搬送装置、印刷装置、ロボットハンド、およびロボット
駆動装置、電子部品搬送装置、電子部品検査装置、ロボットハンド、及びロボット
圧電モーター、駆動装置、電子部品検査装置、電子部品搬送装置、印刷装置、ロボットハンド、およびロボット
駆動力発生装置および駆動装置
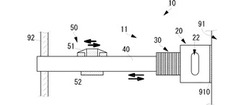
【課題】簡素且つ小型の駆動装置を提供する。
【解決手段】駆動装置10は、錘20、圧電素子30、ロッド40、被駆動部材50を備える。錘20は、固定壁91に弾性固定される。圧電素子30の伸縮方向に沿った一方端は錘20に固定されている。ロッド40は、圧電素子30の伸縮方向に沿った他方端に固定されている。ロッド40の圧電素子30に固定された端部と反対側の端部は、保持壁92の保持用の穴へ挿通されている。ロッド40には、被駆動部材50が摩擦係合している。錘20には貫通穴22が形成されている。この際、貫通穴22は、圧電素子30に印加する駆動電圧信号の2次高調波と、振動系11の2次共振周波数とが一致するような位置および形状で形成される。
(もっと読む)
駆動装置、露光装置及びデバイス製造方法

【課題】光学素子などの物体を上下方向(Z方向)及び傾斜方向(θx方向、θy方向)に駆動する際に、傾斜方向の駆動量を制限して、物体の破損や変形を防止することができる駆動装置を提供する。
【解決手段】物体を駆動する駆動装置であって、複数の圧電素子310a、310b、310cと、複数の電圧印加部320a、320b、320cと、複数の電圧印加部を制御する制御部330とを有する。制御部330は、第1ダイオード331a、331b、331cと、第2ダイオード332a、332b、332cで整流した直流電圧をツェナーダイオード333で電圧をVlim以下に制限する。
(もっと読む)
回転機構付軸方向微動機構およびそれを用いた位置決め装置
【課題】高応答の微動動作が可能であると共に圧電アクチュエータの破損を防止することができる微動機構を提供する。
【解決手段】転がり軸受装置20a、20bの外輪21a、21bの外周面が嵌合するハウジング27と、転がり軸受装置20a、20bの内輪23a、23bの内周面が嵌合する外周面を有する軸11と、外部から印加された電圧に応じて軸方向に伸縮する圧電アクチュエータ36とを備え、軸11の一端に配置された回転機構付軸方向微動機構41において、2つの内輪23a、23bを軸11に軸方向に固定し、外輪の一方21aをハウジング27に軸方向に拘束し、外輪の他方21bの側に圧電アクチュエータ36を配置し、圧電アクチュエータ36の伸縮により2つの外輪21a、21b間の軸方向間距離を変化させて所定の予圧を変化させ、軸方向間距離の変位量の半分が、軸11とハウジング27の相対移動量となる微動動作を行う。
(もっと読む)
超音波モータ及び超音波モータの駆動方法
【課題】複数個の圧電素子からなる超音波モータにより被駆動体を移動させる場合に、各圧電素子の駆動電極に印加する駆動電圧が同位相なことから駆動電圧に同期した速度むらが発生し、被駆動体を一定の速度で移動させる等速性能が劣化する。
【解決手段】複数個の矩形型圧電素子の中で少なくとも1個の矩形型圧電素子の駆動電極に印加する電圧を、他の矩形型圧電素子の駆動電極に印加する電圧と異なる位相の電圧とする。
(もっと読む)
ケースユニットおよびケースユニットによる超音波モータの設置方法
【課題】設置後の予圧調整の必要をなくし格段に作業性を向上できる超音波モータ用のケースユニットを提供する。
【解決手段】ケースユニット100は、被駆動体に当接される超音波モータ200に用いられ、駆動子210を一体に保持する内部ケース230に対して、押圧力を与える外部ケース240に装着可能であり、外部ケース240に固着されたとき、押圧力に対抗して内部ケース230を外部ケース240に仮止め可能である。したがって、仮止めの際に内部ケース230にかかる押圧力を確定させておき、超音波モータ200を所定の位置に設置し、仮止めを外すことで容易に駆動子210を被駆動体に当接させことができる。その結果、超音波モータ200の設置後に予圧調整を行う必要がなくなり格段に作業性が向上する。また、超音波モータ200の設置前に駆動子210の脱落を防止することができる。
(もっと読む)
圧電アクチュエータおよびその製造方法
【課題】精度よく動作することが可能な圧電アクチュエータおよびその製造方法を提供する。
【解決手段】誘電体10の中央部103の上面には、第一電極11と、第一電極11とは異なる極性の電圧が印加される第二電極12とが、左右方向に交互に並んで設けられている。中央部103の底面には、第三電極13と、第三電極13とは異なる極性の電圧が印加される第四電極14とが、左右方向に交互に並んで設けられている。第一、第二電極11,12は、誘電体10の底面に設けられた第三、第四電極13,14に対向しない。第一間隔部104における分極方向は、第一電極11から第二電極12に向かう方向である。第二間隔部105における分極方向は、第三電極13から第四電極14に向かう方向である。第一〜第四電極11,12,13,14に電圧を印加して、圧電アクチュエータ1を振動させる。
(もっと読む)
振動体の駆動方法、振動装置、該振動装置を有する駆動装置と塵埃除去装置と光学機器
【課題】振動によって塵埃を含む対象物を、効率よく所定の方向に移動させることが可能となる振動体の駆動方法等を提供する。
【解決手段】振動体に次数の異なる定在波を、所定の時間位相差を設けて発生させる振動体の駆動方法であって、
振動体は、第1の方向に並ぶ複数の節線を有する第1の振動モードと、
第1の方向に並ぶ節線の数が第1の振動モードと異なり、且つ第1の振動モードよりも固有振動数が高い第2の振動モードと、
固有振動数が、第1の振動モードと第2の振動モードの間に位置する第3の振動モードと、を有し、
第1の振動モードと第2の振動モードの内、第3の振動モードとの固有振動数の差が小さい振動モードに対する加振力を、固有振動数の差が大きい振動モードに対する加振力よりも大きくして駆動する。
(もっと読む)
位置決め装置および位置決め方法
【課題】効率よく安定的な位置決め制御を可能にする位置決め装置および位置決め方法を提供する。
【解決手段】制御量に基づく超音波モータの駆動により対象物の位置決めを行う位置決め装置100であって、動作する対象物が始動する直後、または停止する直前の一連のサイクルのうち少なくとも1つのサイクルにおける制御量を記憶する制御量記憶部110と、記憶された制御量に基づきオフセットを設定するオフセット設定部115と、動作する対象物の目的位置に基づき1サイクル毎に算出位置を指示する指示部120と、動作する対象物の現在位置を検出する位置検出部130と、検出された現在位置および指示された算出位置に基づき制御量を算出する算出部140と、算出された制御量に設定されたオフセットを重畳して超音波モータを駆動し、対象物を動作する駆動部160とを備える。
(もっと読む)
1 - 20 / 143
[ Back to top ]