
Fターム[5H680DD90]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 移動子、振動子の構造 (8,146) | 構成部材の形状 (1,109) | カップ状のもの (13)
Fターム[5H680DD90]に分類される特許
1 - 13 / 13
振動型駆動装置とその移動体の製造方法
【課題】低コスト化、高精度化を図ることが可能となる振動型駆動装置とその移動体の製造方法を提供する。
【解決手段】電気−機械エネルギー変換素子への交流電圧の印加により振動子に楕円運動を励振させ、振動子と接触する移動体を相対移動させる振動型駆動装置であって、
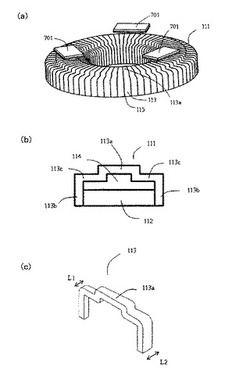
移動体は、本環部と複数の板ばね部とを備え、
複数の各板ばね部は、該板ばね部と本環部を接合する固定部と、振動子と接触する接触部と、接触部と固定部を連結する連結部と、を有し、
接触部に振動子が接触して連結部が変形した際に、板ばね部に所定のバネ剛性を持たせるように、本環部と接触部との間に空間部を設けて複数の板ばね部が固定部を介して本環部と接合される。
(もっと読む)
振動アクチュエータ、レンズ鏡筒、光学機器

【課題】ロータとステータとの固着を抑止できる振動アクチュエータ、レンズ鏡筒、及び、光学機器を提供すること。
【解決手段】振動アクチュエータ(10)を、円環状に形成されるステータ(11)と、前記ステータに接触する円環状の接触面を有し、前記ステータの振動に応じて回転するロータ(15)と、前記ステータと前記ロータとを前記接触面に交差する方向から加圧する加圧部(19)とを備える構成とし、前記ロータを、円環状に形成された本体部(30)と、前記接触面を有する接触部(31)と、前記本体部から前記接触面と略平行な方向へ延在して設けられ、前記本体部と前記接触部とを接続する接続部(32)とを有する構成とし、前記加圧部による加圧状態において、回転軸(18)と直交する面と前記接続部が延在する方向とがなす角度(A1)を、前記回転軸と直交する面と前記接触部の接触面とがなす角度(A2)よりも大きくした。
(もっと読む)
振動型アクチュエータ
【課題】アクチュエータ本体の駆動方向への振動を阻害することなく且つ、駆動子が受ける反力が大きい場合でも駆動力を十分に出力することができるアクチュエータ本体の支持構造を実現する。
【解決手段】超音波アクチュエータ2は、圧電素子を用いて構成されたアクチュエータ本体4とアクチュエータ本体4に設けられてアクチュエータ本体4の振動に従って動作することで所定の駆動方向への駆動力を出力する駆動子49,49と、アクチュエータ本体4を収容するケース5と、アクチュエータ本体4とケース5との間に設けられて、アクチュエータ本体4を5ケースに対して駆動方向に弾性支持する支持ゴム61,61と、アクチュエータ本体4とケース5との間に設けられて、アクチュエータ本体4が駆動方向に変位して当接することによって、アクチュエータ本体4の駆動方向への変位を制限するストッパ63,63とを備えている。
(もっと読む)
振動アクチュエータ
【課題】小型であり且つ単純な構成を有する振動アクチュエータを提供することを課題とする。
【解決手段】ステータ2の角部7に、半球殻形状のロータ8が回転自在に接触配置されると共に、支持部材11によりステータ2上に予圧部12が垂下支持されている。予圧部12は、ロータ8の内部に挿入されてその先端部材13でロータ8の内面9に当接している。予圧部12内に収容されたバネSにより先端部材13がロータ8の内面に圧接されることにより、ロータ8がステータ2に対し加圧されている。振動手段3を駆動することによりロータ8を多軸の回りにそれぞれ回転させることができる。
(もっと読む)
振動アクチュエータ
【課題】小型でありながらも単純な構成で容易に作製することができる振動アクチュエータを提供することを課題とする。
【解決手段】2つのローラ5の間が連結ピン6により連結されると共に、ステータ2、振動手段3及び基部支持部材1の内部にロッド12が挿通され、ロッド12の一端部の板状部13が2つのローラ5の中央部で連結ピン6に連結されている。ロッド12の他端部はバネ受け部材18に固定され、バネ19の付勢力によりバネ受け部材18、ロッド12及び連結ピン6を介してローラ5がステータ2に対し加圧接触されている。駆動回路8により振動手段3を駆動して複合振動を発生させると、各ローラ5とステータ2との接触部分に楕円運動が発生し、2つのローラ5がそれぞれ連結ピン6を中心にして互いに同一方向に回転駆動され、それに伴って先端部材7がステータ2に対して傾動される。
(もっと読む)
多自由度アクチュエータの位置検出装置
【課題】小型で且つ回転子の可動範囲を狭めることなく回転子の回転位置を得ることができる多自由度アクチュエータの位置検出装置を提供する。
【解決手段】第1〜第3のローラ7〜9が回転子6の表面に接触すると共に回転子6の回転に伴って回転可能に配置されている。振動子3を駆動することにより、回転子6が回転すると、そのX軸回りの回転成分に応じて第1のローラ7が、Y軸回りの回転成分に応じて第2のローラ8が、Z軸回りの回転成分に応じて第3のローラ9がそれぞれ回転子6の回転運動に従動して回転し、これら第1〜第3のローラ7〜9の回転方向と回転量がそれぞれ第1〜第3の回転検出センサ10〜12で検出されて検出信号が回転位置算出部16に送出される。回転位置算出部16は、第1〜第3の回転検出センサ10〜12からそれぞれ入力された検出信号に基づき回転子6の回転位置を算出する。
(もっと読む)
通信特性測定システム
【課題】動力源としてのモータが測定結果に影響を与えることのない通信特性測定システムを提供する。
【解決手段】非接触通信ICを含む測定対象を把持し、制御信号にしたがって、リーダライタ・アンテナに対する当該測定対象の位置を可変とする可変位置決め手段としての直交座標型の卓上ロボットまたは6自由度多関節ロボットを備え、非接触通信ICを含む測定対象と前記非接触通信ICとリーダライタ・アンテナとの間の通信特性を測定する。ロボットは動力源として超音波モータを用いる。
(もっと読む)
圧電ポンプ及び振動子に対する配線構造
【課題】導電性金属薄板からなるシムの表裏の少なくとも一方に圧電体を積層してなる圧電振動子と、この圧電振動子の周縁を液密にして可変容積室を形成するハウジングとを有し、この圧電振動子のシムと圧電体との間に交番電流を印加し該圧電振動子を振動させてポンプ作用を得る圧電ポンプにおいて、圧電振動子に対する電気配線の耐久性及び信頼性に優れた圧電ポンプを得る。
【解決手段】圧電振動子に対して交番電流を与えるための給電手段を、絶縁被覆中に、シム用給電線と圧電体用給電線とを埋設した給電FPCから構成し、このシム用給電線と圧電体用給電線とを、シムと圧電体にそれぞれ直接導通接続させた圧電ポンプ。「直接」とは、給電FPC中の給電線を別体としての端子を用いることなく接続することを意味する。
(もっと読む)
圧電駆動装置、撮像装置、および携帯端末装置
【課題】衝撃耐性の向上と装置の小型化・薄型化を実現する駆動装置を提供する。
【解決手段】本発明の駆動装置は、圧電素子と、圧電素子の伸縮方向の一端に固定される錘と、圧電素子の他端に固定される駆動部材とを有し、駆動部材と圧電素子とが前記圧電素子の伸縮方向に対して空間的に重なりを有して当接している。
さらに、前記圧電素子と前記駆動部材とが当接する当接面を含む平面付近に前記駆動部材の重心が位置している。
(もっと読む)
弾性波デバイス
【課題】電極に処理対象である溶液が接触するのを防ぐための側壁を基板上に設けても、この側壁の存在により基板表面上を伝搬する弾性波が減衰するのを抑制する。
【解決手段】センシング用弾性波Wsの伝搬経路上に滴下された液体が励振電極14および受信電極16に接触しないように、伝搬経路上の励振電極側および受信電極側に伝搬経路を交差するように側壁20が配置されている。側壁20における励振電極および受信電極と対向する箇所には、基板12の表面との間に、伝搬経路上の液体が電極側に通過しない程度の大きさを有したトンネル部22a,22bが形成されており、基板12の表面と側壁20とによって形成されたトンネル部22a,22b内を、励振電極14から受信電極16まで至るセンシング用弾性波Wsの伝搬経路が通過するようになっている。
(もっと読む)
構造解析方法、超音波アクチュエータの設計方法、超音波アクチュエータの製造方法、構造解析プログラム、超音波アクチュエータの設計プログラム
【課題】 振動して接触する複数の部材からなる多様な形状の構造体のシミュレーションによる構造解析を、小さな計算負荷にて比較的短時間に実現する。
【解決手段】 超音波モータにおける圧電振動子の接触部と移動子との所定の押し付け圧力下における真実接触面積A0を算出した後(ステップS1)、この真実接触面積A0を圧電振動子の振動による接触面積の変化を考慮した等価変位拘束面積A1に換算し(ステップS2)、等価変位拘束面積A1にて接触した状態で圧電振動子の接触部が移動子に拘束されたと仮定して有限要素モデルを構築し(ステップS3)、この有限要素モデルにて等価変位拘束面積A1で接触した状態の圧電振動子の接触部と移動子について共振周波数を算出し(ステップS4)、算出された共振周波数が圧電振動子の振動モードに適合した値となるまで、押し付け圧力を変化させながら(ステップS6)、ステップS1〜S6を反復する。
(もっと読む)
圧電アクチュエータの駆動方法、圧電アクチュエータの駆動装置、電子機器、圧電アクチュエータの駆動装置の制御プログラム及び記憶媒体
【課題】 圧電アクチュエータの消費電流を低減でき、システムダウンを回避できる圧電アクチュエータの駆動方法の提供。
【課題手段】 圧電素子91へ供給する駆動信号の周波数を所定範囲でスイープさせるとともに、前記圧電素子91の消費電流を検出し、この消費電流が基準値以上となった場合には圧電素子91へ供給する駆動信号の周波数を所定周波数分シフトしたり、初期値に戻して周波数スイープを継続する。圧電素子に供給する駆動信号の周波数をスイープさせる際に、共振周波数部分を外すことができる。このため、圧電素子は、消費電流が最も高くなる共振周波数部分を除いて駆動されるので、消費電流の極端な増加を防止でき、過大な消費電流が流れることによるシステムダウンを回避できる。
(もっと読む)
トルク制御機構付超音波モータ及び超音波モータ搭載ロボット
【課題】回転子に一端が接続されたワイヤを固定子の中空孔を挿通して張力を適宜調節可能に構成して超音波モータの予圧力を適宜調節するトルク制御機構付超音波モータ及び超音波モータ搭載ロボットの提供。
【解決手段】回転子2に一端が接続されてこの回転子2の回転中心Aを通り中空孔1aを挿通して固定子1を縦貫するワイヤ3と、固定子1中に圧電素子11,12,13,14とともに介層されて外表面中間に一体張出し外延した懸架フランジ15を鍔設した中空孔1aの下開口端B側で貫通垂下したワイヤ3下端に固着された張力調節手段5と、を具備させる特徴的構成手段の採用。
(もっと読む)
1 - 13 / 13
[ Back to top ]