
Fターム[5H680FF17]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 製造、制御、電源、保護 (2,336) | 表面処理 (63) | 被膜形成、ライニング、コーティング (41)
Fターム[5H680FF17]に分類される特許
21 - 40 / 41
超音波モータ
【課題】 温度上昇に伴う回転効率の低下を防止した超音波モータを提供する。
【解決手段】 櫛歯体12を備えるステータ1と、櫛歯体12の圧接面12aに圧接される圧接面21aを有する回転可能なロータ2と、ステータ1とロータ2を圧接させるための弾性手段16とを備え、両圧接面の少なくとも一方に温度変化によって摩擦係数が変化する樹脂膜4を有する超音波モータであって、温度変化に伴って弾性手段16の弾性力を変化させ、樹脂膜4の圧接面4aにおける摩擦力をほぼ一定に保持させる圧接力調整手段として形状記憶合金で弾性手段16を構成する。温度上昇して樹脂膜4の摩擦係数が低下した場合でも、圧接力調整手段により圧接力を増大し、樹脂膜4の圧接面4aでの摩擦力をほぼ一定に保持し、温度変化に伴う回転効率の低下を防止する。
(もっと読む)
モータ、レンズ鏡筒、カメラシステム、及びモータの製造方法

【課題】長寿命で安定した振動波モータ、レンズ鏡筒及びカメラシステムを提供する。
【解決手段】電気機械変換素子11の励振により、弾性体12に振動を発生する振動子と、振動子に加圧接触され、振動により、その振動子との間で相対運動を行う相対運動部材13とを備えた振動波モータであって、振動子と相対運動部材13との摩擦接触面の少なくとも一方には、シリコンビーズとエポキシ樹脂とを用いたエポキシ樹脂膜17が形成されていることを特徴とする振動波モータ10とした。
(もっと読む)
駆動装置
【課題】コンパクトな構成で効率良く駆動出力を取り出すことができる駆動装置を提供する。
【解決手段】駆動装置は、共振周波数の電圧を印加することにより駆動方向に対して垂直方向に伸縮変形を行う縦一次振動モードと屈曲変形を行う屈曲一次振動モードとを励起可能な振動部4と、振動部4の両サイドを加圧状態で挟持する2本のガイド棒3とを備えている。上記の縦一次振動モードと屈曲一次振動モードとを振動部4で励起することにより、ガイド棒3と接触する振動部4の両サイド、つまり突起部411〜412および突起部413で互いに逆回りとなる回転運動Ka、Kbが生じるが、この回転運動を用いて振動部4がガイド棒3に対して移動する。このような駆動装置により、コンパクトな構成で効率良く駆動出力を取り出すことができる。
(もっと読む)
圧電駆動型MEMSアクチュエータ
【課題】圧電膜等の残留歪による反りの影響を抑制して、圧電駆動の変位量を再現良く、かつ高精度で制御可能な圧電駆動型MEMSアクチュエータを提供する。
【解決手段】基板1上に少なくとも一端が固定され、第1下部電極13と第1上部電極17と、それらに挟まれるように形成された第1圧電膜14とからなる第1アクチュエータ11と、第1アクチュエータに接続された第1作用部12と、基板1上に少なくとも一端が固定され、第1アクチュエータと並行して配置され、かつ第1下部電極と同層となる第2下部電極23と、第2下部電極上に形成され第1圧電膜と同層となる第2圧電膜24と、第2圧電膜上に形成され第1上部電極と同層となる第2上部電極27とを有する第2アクチュエータ21と、第2アクチュエータに接続された第2作用部22とを備え、第1作用部と第2作用部とで電気回路要素を構成する。
(もっと読む)
駆動装置、それに用いられる電気機械変換素子、撮像装置、及び携帯電話
【課題】連結部における接着力を強固にすることにより、連結部の破損を防止し、十分な強度が確保でき、接着部品の一体化により駆動速度を上昇させる、すなわち駆動特性を向上させる駆動装置、それに用いられる電気機械変換素子、撮像装置、及びを提供する。
【解決手段】駆動装置1は、電気信号の入力により伸縮可能な圧電素子3と、この圧電素子3の伸縮方向における一端部に接着剤9により連結された駆動部材4と、駆動部材4に摩擦係合された被駆動部材6と、を備え、被駆動部材6を駆動部材4に沿って移動させる。この駆動装置1では、圧電素子3における接着剤9による接着面3aに、当該接着面3aを除く他の面3bの表面粗さより粗い領域が設けられ、接着面3aが洗浄されて、駆動部材4の一端が当該接着面3aに接着されているため、圧電素子3と駆動部材4との接着力が強固にされている。
(もっと読む)
超音波モータ、および超音波モータの作製方法
【課題】φ1.5mm以下の超小型の超音波モータを提供する。
【解決手段】超音波モータ2は、構成する部品が薄膜パターンで形成され、常温接合を応用した技術により、接合面を直接接触させて接合して作製される。共通電極21bは、圧電体11に形成された駆動電極20bの所定位置に接合される。圧電体11と振動板12とは、駆動電極20aおよび共通電極21aを接合層として接合される。寸法精度、組み立て精度が高い超小型の超音波モータ2を得ることができる。
(もっと読む)
弾性表面波アクチュエータ、移動子、及びステータ
【課題】 移動子とステータ間の摩擦係数が確保でき,長寿命で信頼性の高い弾性表面波アクチュエータ、この弾性表面波アクチュエータに用いる移動子、及びこの弾性表面波アクチュエータに用いるステータを提供する。
【解決手段】 レイリー波を伝搬しているステータ11の表面から運動エネルギを得て、レイリー波の伝搬方向と逆方向に、ステータ11に対し相対的に移動する移動子(スライダ)12であって、この移動子12が、移動子基板122と、この移動子基板122よりもヤング率の大きな材料からなる複数の移動子セグメント123の配列からなり、この複数の移動子セグメント123のそれぞれの上面が振動子に接する移動子セグメントアレイとを備える。
(もっと読む)
アクチュエータ
【課題】低コスト化を図ることができるアクチュエータを提供すること。
【解決手段】本発明のアクチュエータは、第1の弾性連結部25、25を捩れ変形させながら第1の質量部21、22を回動させ、これに伴い、第2の弾性連結部26、26を捩れ変形させながら第2の質量部23を回動させるものであって、第1の弾性連結部25、25の捩れ変形を規制または抑制するとともに、除去可能に設けられた除去部29、29を有し、除去部29、29を必要に応じて除去することにより、第1の弾性連結部25、25のバネ定数を低減することが可能である。
(もっと読む)
駆動装置及び駆動装置の制御方法
【課題】駆動に寄与しない方向の振動変位を発生させることなく効率的な駆動を可能とした駆動装置を提供する。
【解決手段】振動型アクチュエータは、弾性体2と圧電素子3から構成されると共に接触部4が配設された振動体1を備える。振動体1に対し、縦振動1次モードによる振動変位Wyと、曲げ振動1次モードによる振動変位Wzを時間的位相差が90度となるように発生させ、振動体1の両方の接触部4に、X軸回りの楕円運動または円運動を形成する。これに伴い、両方の接触体5は、振動体1の一方の接触部4では時計回り、振動体1の他方の接触部4では反時計回りとなるように、回転軸が同一方向である回転運動を行う。ここで、縦振動1次モードによる振動変位Wyに替えて縦振動2次モードによる振動変位Wy’を発生させると、両方の接触体5の回転方向が一致する。
(もっと読む)
オーステナイト系ステンレス鋼の窒化処理方法、窒化部材、および振動波駆動装置
【課題】加工性および耐食性が優れ、さらに厚い窒化層が形成された窒化部材と、該窒化部材が摩擦部材として用いられる振動波駆動装置を提供する。
【解決手段】Tiの含有量が0.8〜3.0重量%であるオーステナイト系ステンレス鋼に対する窒化処理が、773Kを超える温度でイオン窒化処理によって実施される。また、電気−機械エネルギ変換素子により振動が励振される振動子と該振動子によって励振される振動によって駆動される移動子との間に設けられる摩擦部材として上記窒化部材を用いる振動波駆動装置。
(もっと読む)
圧電アクチュエータの位置制御駆動方法、圧電アクチュエータの位置制御駆動装置、および電子機器
【課題】位置制御性能を高くできるとともに、構成が簡略であって、磨耗を格段に低減できる圧電アクチュエータの位置制御駆動方法、圧電アクチュエータの位置制御駆動装置の提供。
【解決手段】圧電アクチュエータの位置制御駆動方法では、駆動信号をオンとするとともに、ロータの位置の検出に基いてロータが位置出し開始位置X1に達したか否かを判定し、達したと判定されるまで、オンを継続した後、駆動信号をオフとする継続送り工程P11と、位置出し開始位置X1を超えた位置から目標位置X0を含む位置までで設定された複数の制御位置にロータが順次達するように、各制御位置について、ロータが当該制御位置に達したか否かを判定し、達していないと判定された際は、駆動信号をオンとし、達したと判定された際は、駆動信号をオフとするとともに、次の制御位置についての判定に移行する微動送り工程P12とを備える。
(もっと読む)
超音波モータ
【課題】 ロータとステータの圧接状態を改善してロータの回転効率を向上した超音波モータを提供する。
【解決手段】 圧電体13及び円周方向に配列した多数の櫛歯121を備える櫛歯体12で構成されるステータ1と、回転軸3に支持されて櫛歯に圧接されるロータ2とを備え、各櫛歯121は少なくともロータ2に圧接する部分が所要の間隔で径方向に配列された複数の針状体122で構成する。針状体122は先端部が径方向に弾性変形可能で、円周方向には所要の剛性を有する構成とする。ロータ2が櫛歯121に圧接したときに針状体122は径方向に弾性変形することで各針状体122の先端がロータ2に確実に圧接し、ロータ2と櫛歯121との摩擦力を所定の摩擦力に保持でき、ステータ1の振動によるロータ2の回転効率を高くする。
(もっと読む)
弾性表面波アクチュエータ
【課題】
励振手段の破損を防止でき、しかも固定子の耐久力を向上できる弾性表面波アクチュエータを提供する。
【解決手段】
弾性表面波アクチュエータは、圧電基板2と該圧電基板2の表面に形成されて圧電基板2に弾性表面波を発生させる励振手段となる電極3a,3bとを備える固定子1と、電極3a,3bが形成される励振用部位P1を除く圧電基板2の表面部位P2に所定の圧力で接触されて弾性表面波により移動させられる移動子4とを具備し、移動子4を接触移動させる移動用部位P3を含む圧電基板2の表面部位P2には、圧電基板2よりも高い硬度を有する硬質膜5が形成され、硬質膜5は、移動子4と電極3a,3bとが干渉しない程度の膜厚を有している。
(もっと読む)
圧電アクチュエータの製造方法
【課題】屈曲状の複数の駆動部とこれら複数の駆動部にそれぞれ配置された圧電層とを有する圧電アクチュエータを、より簡単に製造することが可能な製造方法を提供すること。
【解決手段】まず、板状部材24に、複数の貫通状のスリット28を形成して複数の駆動部20を分割形成する。次に、板状部材24に圧電材料の粒子を堆積させることにより、複数の駆動部20に複数の圧電層26をそれぞれ形成する。そして、各圧電層26にその厚み方向の電界を印加するための個別電極27を形成してから、複数の駆動部20を、板状部材24の面方向と直交する方向に突出するように折り曲げる。
(もっと読む)
振動波モータ
【課題】摩擦接触面の磨耗を少なくし、駆動性能を安定化し、異音の発生が無く、長寿命化を図ることができる振動波モータを提供する。
【解決手段】圧電体11の励振により振動を発生する弾性体12と、弾性体12に加圧接触し、その振動により駆動される移動体13とを備える振動波モータ10において、弾性体12と移動体13との摩擦接触面を含む部分の少なくとも一方は、無電解Ni−P/PTFE複合メッキ皮膜層17であり、他方は、アルマイト皮膜層18であり、無電解Ni−P/PTFE複合メッキ皮膜層17及びアルマイト皮膜層18は、ともにビッカース硬度が250以上であり、かつ、そのビッカース硬度差が100以下であるものとする。
(もっと読む)
振動波モータ
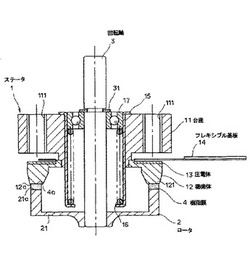
【課題】コストダウンと静寂性を両立させることができる振動波モータを提供する。
【解決手段】駆動信号により励振される圧電体2とこの圧電体2に接合され、前記励振により駆動面に進行性振動波を生じる円環状の弾性体3とを有する振動体1と,弾性体3の駆動面に加圧接触され、前記進行性振動波によって駆動される移動子5と,弾性体3を内周面で支持するフランジ部3cと,移動子5に弾性体3を、フランジ部3cを介して加圧する加圧部材9とを含み、振動体1の圧電体2との間に、フレキシブルプリント基板4を挟んで、振動体1と移動子5との摩擦駆動による異音の発生を抑制するブチルゴムシート31を設ける。
(もっと読む)
超音波モータおよび超音波モータシステム
【課題】 加圧機構を簡略化して小型化するとともに、超音波振動子に対して被駆動体を高精度に相対移動させる。
【解決手段】 駆動電圧を供給されることにより、異なる2つの振動モードを同時に発生させて出力端に略楕円振動を生じさせる超音波振動子2と、該超音波振動子2の出力端に固定された接触部材10と、該接触部材10により押圧される磁性材料からなる被駆動体3と、接触部材10に設けられ、被駆動体3を接触部材10側に磁気吸引して両者を密着させる磁界Mを発生する磁界発生手段と、被駆動体3に固定され、磁界発生手段により発生された磁界Mの強さを検出する磁気センサ4とを備える超音波モータ1を提供する。
(もっと読む)
超音波モータとその運転方法
【課題】 複数の振動モードを同時に発生させる超音波モータにおいて、各振動モードを効率よく発生させて、安定して高いモータ出力を得る。
【解決手段】 電気機械変換素子を備え、該電気機械変換素子に所定の位相差および所定の駆動周波数の2相の交番電圧を供給することにより、異なる2つの振動モードを同時に発生させて出力端14に略楕円振動を生じさせる超音波振動子3と、該超音波振動子3の出力端14を被駆動体2に押し付ける押圧手段4とを備え、該押圧手段4による超音波振動子3の出力端14の被駆動体2への押圧力が、2つの振動モードの機械的共振周波数をほぼ一致させるように設定されている超音波モータ1を提供する。
(もっと読む)
振動アクチュエータ及び振動アクチュエータの製造方法
【課題】汎用の工作機械を用いて、弾性体と電機機械変換素子との接着強度及び導通を確保した振動アクチュエータを提供する。
【解決手段】振動アクチュエータ10を、円環状に形成され、その一方の端面に、径方向成分を含む複数の微細溝21cを周方向に周期性を持って分布させた接着剤受容層を有する弾性体21と、弾性体21の端面に対向して配置された圧電体22と、弾性体21と圧電体22との間に設けられた接着剤層23とを備える構成とする。
(もっと読む)
振動体及び振動型駆動装置
【課題】 主に振動減衰を抑制することのできる振動体を提供する。
【解決手段】 相互に接触する複数の弾性体(2、3)と、電気信号が供給されることにより弾性体に振動を励起する電気−機械エネルギ変換素子(4)とを有し、複数の弾性体間の隙間に、樹脂材料が設けられている。
(もっと読む)
21 - 40 / 41
[ Back to top ]