
Fターム[5J023DB00]の内容
遅延要素を用いたフィルタ (1,075) | フィルタの構成 (148)
Fターム[5J023DB00]の下位に属するFターム
デジタルフィルタ (102)
スイッチドキャパシタフィルタ(SCF) (1)
トランスバーサルフィルタ (11)
くし形
複数フィルタの組合せ (28)
電荷転送装置(CTD)
Fターム[5J023DB00]に分類される特許
1 - 6 / 6
適応ノッチフィルタ、及びノッチフィルタのパラメタ調整方法
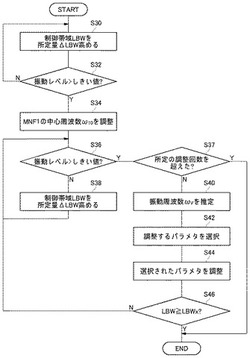
【課題】制御帯域を広げたときに生じる振動周波数成分を抑制するよう自動的にノッチフィルタを調整する。
【解決手段】適応ノッチフィルタは、共振が生じ得る制御対象への制御入力を生成するための信号に含まれる当該制御対象の固有振動数成分を抑制するためのノッチフィルタと、ノッチフィルタの中心周波数及びノッチ幅を含むパラメタを調整するためのパラメタ調整部と、を備える。パラメタ調整部は、制御対象の制御帯域を広げたときに生じた振動周波数成分とノッチフィルタの中心周波数との関係に応じて、調整されるべきノッチフィルタのパラメタを選択する。
(もっと読む)
基準信号発生装置

【課題】常に高精度な制御電圧信号のレベル(DAC値)の推定を行うことができる基準信号発生装置を実現する。
【解決手段】制御部10は、起動とともに計時を開始し(S102)、計時を行いながら(S103)、自走DAC値の算出タイミングを検出して自走DAC値の算出タイミングになると(S104:Yes)、予め設定したタイミング(起動からの経過時間)と重み付け係数との関連テーブルから、重み付け係数Wを設定する(S105)。この際、重み付け係数は、起動からの経過時間が長いほど大きな値に設定される。これにより、DAC値の変動が激しい起動からの経過時間が短い期間では、過去のDAC値が今回の推定値に与える影響が少なくなる重み付けがなされる。一方、経過時間が十分に長いDAC値が安定する期間では、過去のDAC値が今回の推定値に与える影響が大きくなる重み付けがなされる。
(もっと読む)
多段階構成をなす適応等化器を用いた情報伝送システム
【課題】複数の適応等化器を多段階に縦型接続する手段を用いることによって、適応等化器を単体で用いた場合より、システム性能を向上させる情報伝送システムを提供する。
【解決手段】情報源から送信された送信信号は、通信路で雑音を受け、受信信号として適応等化器に入力され、それを経て出力信号となり、最終的に受信者に伝送される情報伝送系において、発明した情報伝送システム(図1)は、複数(N個)の適応等化器を備え、それらを多段階(N段階)に縦型接続することによって、適応等化器を単体で用いる情報伝送システムより性能を向上させる。発明した情報伝送システム(図1)は、適応等化器の構成(線形等化器、非線形等化器)や適応等化器のモード(トレーニングモード、トラッキングモード)に拠らず、適用可能な方法である。
(もっと読む)
雑音消去装置、雑音消去方法および雑音消去プログラム
【課題】動的に変化する装置や環境においても適切なタップの係数更新を行い、適応フィルタの係数更新の計算量を削減でき、適応速度の低下を抑制することができるようにする。
【解決手段】係数更新手段40は、雑音抑圧信号を用いて適応フィルタのフィルタ係数を更新する。ピークタップ位置導出手段90は、雑音源と参照入力端子2および音声入力端子1との相対的位置関係により、フィルタ係数がピーク値となるタップを示すピークタップ位置を導出する。 区間分類手段41は、ピークタップ位置を利用して、フィルタ係数に対応するタップ位置の区間を分類する。係数更新手段40は、区間分類手段41によって分類された区間毎に、区間に対応するフィルタ係数の更新頻度を制御する。
(もっと読む)
状態推定装置及び状態推定方法
【課題】推定処理の途中で、必要なモデルを判別して、不要なモデルのカルマンフィルタの処理結果がフィルタ全体の推定精度に与える悪影響を抑制することができるようにする。
【解決手段】統合処理部10がカルマンフィルタ処理部3−1〜3−3から出力された各モデルの状態ベクトル推定値の更新値xk|k(j)ハット及び推定誤差共分散行列の更新値Pk|k(j)のうち、モデル構成判定部8により使用すると判別されたモデルの状態ベクトル推定値の更新値xk|k(j)ハット及び推定誤差共分散行列の更新値Pk|k(j)を、モデル確率計算部6により計算されたモデル確率μk(j)に応じた統合加重で統合する。
(もっと読む)
信号処理装置、信号処理方法、ならびに、プログラム
【課題】通信路の伝搬状況が時間変動する場合にも環境雑音や他のユーザからの干渉を抑制する適応的な線形フィルタを算出する信号処理装置等を提供する。
【解決手段】信号処理装置において、Nチップのシグネチャを正逆に反転させて1ビットを伝送する送信局の信号を得るための適応線形フィルタを得るため、所望局のシグネチャs[1]および振幅初期値A[1]と、干渉局のシグネチャ推定値s[2],…,s[J]および振幅推定値A[2],…,A[J]と、から、2次計量行列Qを求めて、線形フィルタh[1]を求める。計量行列Qは、s[・],A[・]から求められる線形フィルタ推定値h*と、現在の線形フィルタの値h[1]と、の差に直交行列Uを乗じて微少量δを加算したものを対角成分とする行列であり、必要に応じて更新される。
(もっと読む)
1 - 6 / 6
[ Back to top ]