
Fターム[5J070AE10]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 家畜 (23)
Fターム[5J070AE10]に分類される特許
21 - 23 / 23
距離検知装置
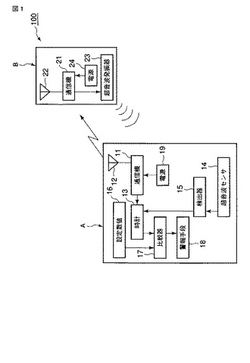
【課題】距離を検知する際の誤差を抑えて、かつ、安価な距離検知装置を提供することを目的とする。
【解決手段】電波を送信する第1通信手段11と、音波を受信して電気信号に変換するセンサ14と、センサ14で変換された信号から特定の信号を検出する検出手段15と、を有する第1装置Aと、第1通信手段11からの電波を受信する第2通信手段21と、第2通信手段21が電波を受信したときに音波を発振する音波発振手段23と、を有する第2装置Bと、を備え、第1装置Aは、第1通信手段11が第2通信手段21に電波を送信してから、センサ14が音波発振手段23からの音波を受信し、検出手段15によって特定の信号が検出されるまでの時間を計測する時計13をさらに備え、時計13が計測した時間と、音波の速さとから第1装置Aと第2装置Bとの間の距離を検知する距離検知装置。
(もっと読む)
未知の障害物の中の予測不可能な目標物の実時間追跡
本発明の実施例は、環境内の障害物の配置についての事前の知識を必要とせず、ロボットが追跡する目標物の軌跡も知らずに、障害物のある環境内で動作する移動ロボットの運動を計算するための計画を提供する。本発明の実施例は、目標物の位置と環境内の障害物の位置の測定結果に基づいて、監視ロボットの運動を支配するアルゴリズムを提供する。アルゴリズムは目標物と障害物によって作られた監視者の視野領域との間の幾何学的配置を計算によって記述し、この記述を用いて連続的な制御則を計算する。本発明の実施例は、逃走経路ツリーデータ構造を使用して目標物の監視ロボット検出器からの逃走について起こり得るモードを分類し、逃走経路ツリーを用いて目標物の最短逃走経路を決定する。  (もっと読む)
(もっと読む)
情報入力方法及び情報入力装置

【課題】対象物の3次元空間における位置情報並びに物性情報を検出して、少なくとも1つのポイントの位置情報または変位情報を検出して、電子機器などの機器に対して、たとえ複数の高精度なデータであっても、その情報入力を行うことができる技術である。
【解決手段】電磁波を発信する電磁波発信手段10からの電磁波に対して、一つ以上の対象物によって反射波が生成され、反射波が電磁波受信手段20で受信される。信号処理手段30で、受信した電磁波の信号に基づき、反射波を生成した対象物の3次元空間における位置情報を算出すると共に対象物をそれと同定する物性情報を検出し、こうして検出した複数の情報に基づき入力信号を一つ以上生成して、入力信号を機器に対して提供する。
(もっと読む)
21 - 23 / 23
[ Back to top ]