
Fターム[5J084EA24]の内容
光レーダ方式及びその細部 (24,468) | 目的 (2,756) | 光レーダ妨害又は対妨害 (6)
Fターム[5J084EA24]に分類される特許
1 - 6 / 6
電磁波及び/又は弾性波にさらされたオブジェクトの三次元合成再構成の方法
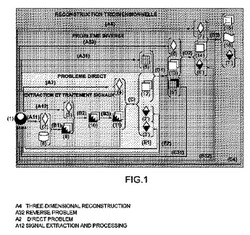
電磁波及び/又は弾性波にさらされたオブジェクトを、感知信号(特にノイズの多い弱信号)に基づく有用な三次元情報の識別によって、合成的に再構成する方法である。この方法は、判定基準(2)、(3)、(4)、(6)、(7)、及びグリッド(5)を、知識ベース(1)から抽出するステップ(A11)、(A12)、(A2)、(A31)、(A32)、(A4)と、判定基準(2)によってフィルタリングされた感知信号(8)から、弱信号(9)を抽出するステップ(B1)と、判定基準(3)によってフィルタリングされた弱信号(9)から、問題の弱信号(10)を抽出するステップ(B2)と、問題の弱信号(10)からノイズを除去して増幅し(B3)、有用な弱信号(11)を取得するステップと、判定基準(4)によってフィルタリングされた有用な弱信号(11)から、有用な直接情報(12)を識別し(C)、最適な判定基準(2’)及び(3’)を与えるステップと、グリッド(5)によってフィルタリングされた有用な直接情報(12)を使用して、問題の情報(13)を再構成し(D1)、最適なグリッド(5’)を与えるステップと、判定基準(6)によってフィルタリングされた問題の情報(13)を使用して、有用な情報(14)を再構成し(D2)、最適な判定基準(6’)を与えるステップと、判定基準(7)によってフィルタリングされた有用な情報(14)に基づいて、オブジェクトに関する三次元情報(15)を再構成し、認識状態ファイル(16)を与え、最適な判定基準(7’)を与えるステップと、知識ベース(1)において、判定基準(2)、(3)、(6)、(7)、及びグリッド(5)を、最適な判定基準(2’)、(3’)、(6’)、(7’)、及び最適なグリッド(5’)で更新する(E1)、(E2)、(E31)、(E32)、(E4)か、又は判定基準(2)、(3)、(6)、(7)、及びグリッド(5)を変更するステップと、を含む。この方法は、工業、医療、保安、及び防衛におけるリスク管理及びパフォーマンス管理用に問題のオブジェクトを識別する目的で設計されたものである。 (もっと読む)
立体撮像装置および立体撮像装置の制御方法並びにプログラム

【課題】TOF方式により測距を行うための撮像手段と、ステレオマッチングにより測距を行う撮像手段を備えた立体撮像装置において、被写体への測距光の照射を制限できるようにする。
【解決手段】第1の距離画像生成部30において、第1の撮像部2Aが取得した距離画像用のデータから距離画像D1を生成する。第2および第3の撮像部2B,2Cが取得した基準画像および参照画像からステレオマッチング部31が対応点を検出し、第2の距離画像生成部32が距離画像D2を生成する。この際、第1の撮像部2Aによる撮像前に第2および第3の撮像部2B,2Cにより撮像を行い、顔検出部39がこれにより取得した画像から顔等の所定被写体を検出する。所定被写体が検出された場合には、第2および第3の撮像部にのみ撮像を行わせ、第2の距離画像生成部32にのみ距離画像D2を生成させる。
(もっと読む)
ターゲット捕捉装置
【課題】ターゲットに対する捕捉性能の向上と共に、飛翔体に設置するに好適するターゲット捕捉装置を提供すること。
【解決手段】ターゲット捕捉装置30は、アジマス方向回動軸受33および赤外レーザ光生成手段32aを備えた基台32と、この基台32のアジマス方向回動軸受33に軸支されるターゲット捕捉装置本体31とを具備する。ターゲット捕捉装置本体31は、ターゲット側から受信する赤外レーザ光bにてターゲットの測距を行うターゲット照準装置35と、当該ターゲット照準装置35を軸支するエレベーション方向回動軸受37とを備え、ターゲット照準装置35は、微動鏡41および反射光受信器40を有する微動鏡装置42とターゲットへ照準を合わせる照準方向微調整基台45とを備える。基台32側とターゲット捕捉装置本体31との間には、基台32側の赤外レーザ光生成手段32aにて生成された赤外レーザ光bをターゲット捕捉装置本体31側に導光する赤外導光路qを備える。
(もっと読む)
光波妨害装置及び光波妨害方法
【課題】 熱源目標から反射光目標に妨害レーザ光の追跡移管を行う際に、反射光目標を確実に判別する。
【解決手段】 赤外線カメラ111の撮像画像を取り込んで熱源目標の像を判別し、カメラ視軸に熱源目標の像が重なるように目標追跡装置11を指向制御して熱源目標を追跡する。ここで、レーザ発生装置12で発生されるレーザ光を微動鏡112により目標方向に指向させ、角度センサ113からカメラ視軸に対する角度情報を取得し、この角度情報を赤外線画像の座標に変換して、視軸座標との関係から、目標光波シーカのレーザ反射光による像が出現する範囲を予測する。この予測の下で、赤外線画像から予測範囲に現れる光像を抽出し、その座標とレーザ光変換座標との誤差に基づいて、その光像が反射光目標か否かを判定し、その判定結果に基づいて熱源目標から反射光目標に追跡移管を行う。
(もっと読む)
照準/妨害検知機能付きレーザレーダ装置
【課題】同じ波長のレーザ光が照準光または妨害光として用いられた場合でも、照準光及び妨害光の存在を検知し、かつその影響を受けることなく対象物の位置情報(距離、位置、速度等)を正確に検出できる照準/妨害検知機能付きレーザレーダ装置を提供する。
【解決手段】対象物1に向けて所定の送信レーザ光2を周期的に送信し、かつ送信レーザ光の送信休止期を有するレーザ送信装置10と、対象物からの受信レーザ光3を受信するレーザ受信器20と、送信レーザ光と受信レーザ光から対象物の位置情報を演算する演算装置40とを備える。演算装置40は、送信休止期に対応する受信信号を外部信号4として検出する外部信号検出回路41aと、受信レーザ光から外部信号を低減する外部信号低減回路41bを有する。
(もっと読む)
光送受信装置および光送受信方法
【課題】高い指向性能と、光送受信装置全体として小型化・軽量を図る。
【解決手段】光送受信装置20は、アジマス方向回動軸受30と共に赤外レーザ光b1を送出する基台22と、この基台22のアジマス方向回動軸受30に回動自在に支持される光送受信装置本体21とを具備し、光送受信装置本体21側からターゲット向けて照射する赤外レーザ光b1の反射赤外レーザ光b2を受けてターゲットの測距を行う機器群45と、機器群45をエレベーション方向に回動自在に支持するエレベーション方向回動軸受41と、エレベーション方向回動軸受41を支持する支持枠体24と、アジマス方向回動軸受30とエレベーション方向回動軸受41には、それぞれ設けられる透孔部30a,41aと、各透孔部30a,41a間を導光接続可能に設けられる空間導光路qとを備え、基台22側から送出される赤外レーザ光b1を、空間導光路qを介して上記機器群45側へ導光する。
(もっと読む)
1 - 6 / 6
[ Back to top ]