
Fターム[5L096GA03]の内容
Fターム[5L096GA03]に分類される特許
1 - 20 / 32
信号処理装置
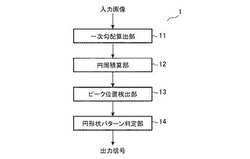
【課題】画像内に同心円形状パターンが存在するか否かの判定を高精度に行うことができる信号処理装置を提供する。
【解決手段】入力画像の勾配成分を算出した結果を、着目画素を中心として円周方向に積算した後、積算された勾配成分からピーク位置を検出することで、入力画像に同心円形状パターンが存在していると判定する。このように入力画像の勾配成分を円周方向に積算するため、雑音が多い画像内での同心円形状パターンや、先鋭度の低い同心円形状パターンであっても、画像内の円形状を高精度に検出することができる。
(もっと読む)
特徴点抽出方法、特徴点抽出装置、プログラム及び記録媒体

【課題】低コントラスト画像の特徴点を抽出する。
【解決手段】本発明に係る特徴点抽出方法は、画像を受信する受信ステップ(101)と、上記画像の複数の画素について、特徴点を示す特徴計測を算出する特徴計測算出ステップ(102〜107)と、上記複数の画素の1つに関する統計的計測を算出する統計的計測算出ステップと、上記統計的計測に基づいて、閾値を決定する閾値決定ステップと、上記閾値と上記特徴計測とに基づいて、上記複数の画素の1つが上記特徴点であるか否かを決定する特徴点決定ステップ(108)とを含んでいる。
(もっと読む)
情報処理装置、情報処理方法、およびプログラム
【課題】被写体の個人差に依存せずに高精度に視線方向を推定する。
【解決手段】被写体の視線方向を検出する情報処理装置であって、撮像部により撮像された被写体の画像を取得する取得部と、画像から被写体の顔領域を検出する顔領域検出部と、被写体の目領域を検出する目領域検出部と、顔領域検出部により検出された顔領域と、目領域検出部により検出された目領域との画像内における位置関係から、顔領域について高解像度の正規化画像と低解像度の正規化画像とを生成する正規化画像生成部と、低解像度の正規化画像から顔領域に存在する顔の向きを示す第1特徴量を抽出する第1抽出部と、高解像度の正規化画像から目領域に存在する目の向きを示す第2特徴量を抽出する第2抽出部と、第1特徴量および第2特徴量から被写体の視線方向を推定する推定部と、を備える。
(もっと読む)
まぶた検出装置及びプログラム
【課題】まぶたに化粧をしている場合であっても、まぶたと眼球との境界を正しく検出することができるようにする。
【解決手段】目画像におけるまぶたの境界における縦方向の濃淡変化の1次微分値と2次微分値とに基づいて、2次微分値を、まぶたの境界における濃淡変化の周波数の周期の1/4だけ、上方向にずらし、1次微分値と2次微分値とを組み合わせて、上瞼特徴量を算出する。算出された上瞼特徴量の縦方向のピーク点に基づいて、上まぶたと眼球との境界を検出する。
(もっと読む)
二次導関数エッジ検出方法のためのエッジオリエンテーション
特徴点の効率的なスケールスペース抽出及び記述
スケールスペースの複数の特徴点を効率的に抽出及び記述するための方法、システム、及びコンピュータプログラム。本発明は、計算の複雑性の全体の低減に向けて設計される。一方では、記述フェーズにおいて抽出中に取得されるデータは、集中的に再利用される。他方では、処理速度を劇的に向上させる記述のアルゴリズム最適化が提案される。まず、画像は、異なる複数のスケールで三角形カーネルを用いてフィルタリングされる。三角形フィルタリングされた複数の画像は、複数のキーポイントの主要な方向の抽出とダイジーのような記述子の計算のために再利用される。  (もっと読む)
(もっと読む)
エッジ抽出方法及びエッジ抽出装置
【課題】曲部分に対しても高精度にエッジを抽出することができるエッジ抽出方法を提供する。
【解決手段】 画像データに対して平滑化を行うとともに、画素精度のエッジ点を抽出するエッジ点抽出ステップと、抽出した各エッジ点に基づいて、サブピクセルエッジ位置を取得するサブピクセルエッジ位置取得ステップと、前記エッジ点抽出ステップにおいて抽出した各エッジ点、又は前記サブピクセルエッジ位置取得ステップで取得した各サブピクセルエッジ位置における曲率を算出する曲率算出ステップと、前記サブピクセルエッジ位置取得ステップにおいて取得したサブピクセルエッジ位置の座標に対して、前記曲率と前記エッジ点抽出ステップで行った平滑化のスケールの2乗に比例する誤差量の関係式を補正量として用いて、前記サブピクセルエッジ位置を補正するサブピクセルエッジ位置補正ステップと、を含むエッジ抽出方法。
(もっと読む)
画像処理装置、画像処理システムおよび画像処理方法
【課題】濃度値にピークを持たないエッジであってもエッジ座標をサブピクセル単位で求める。
【解決手段】画像処理システム1では、撮像装置2によって対象物Aが撮像される。画像処理装置3のエッジ候補検出部33は、対象物Aが撮像された濃淡画像内においてエッジ候補を画素単位で検出する。検査領域設定部34は、濃淡画像にエッジ候補とこのエッジ候補の両側に位置する複数の画素からなる検査領域を設定する。2次微分値算出部35は、検査領域内の各画素に対してエッジ抽出フィルタを用いて濃度値の2次微分値を求める。エッジ座標算出部36は、エッジ候補に隣接する2組の隣接画素群のうち、2次微分値の符号が異なる組み合わせが多い隣接画素群を第2のエッジ候補として選択する。上記エッジ座標算出部36は、エッジ候補の2次微分値と第2のエッジ候補の2次微分値とを用いて、検出対象エッジのエッジ座標をサブピクセル単位で求める。
(もっと読む)
学習装置および方法、認識装置および方法、プログラム、並びに記録媒体
【課題】処理速度を向上させた画像認識を行う。
【解決手段】ピラミッド画像生成部20は、入力された画像から、複数の解像度(スケール係数)が異なる画像を生成する。スケール係数の異なる画像に対して、フィルタ処理が施される。フィルタは、例えば、ガウス幅σ=1のガウス関数のフィルタである。複数の画像に対してフィルタ処理を施すが、ガウス幅の異なる複数のフィルタを用いて処理を行うのではないために、処理の低減をはかることができる。本発明は、画像から対象物を認識する認識装置や認識装置のための学習を行う学習装置に適用できる。
(もっと読む)
画像処理装置および方法、プログラム、並びに記録媒体
【課題】処理速度を向上させた画像認識を行う。
【解決手段】ピラミッド画像生成部20は、入力された画像から、複数の解像度(スケール係数)が異なる画像を生成する。スケール係数の異なる画像に対して、フィルタ処理が施される。フィルタは、例えば、ガウス幅σ=1のガウス関数のフィルタである。複数の画像に対してフィルタ処理を施すが、ガウス幅の異なる複数のフィルタを用いて処理を行うのではないために、処理の低減をはかることができる。本発明は、画像から対象物を認識する認識装置や認識装置のための学習を行う学習装置に適用できる。
(もっと読む)
画像処理方法および装置
【課題】簡単な構成によって精度のよい2値化を行うことができ、ラインペア形状を正確に判別すること。
【解決手段】入力画像GD1を2値化する2値化処理部12と、入力画像GDのラインペア形状を判別するラインペア判別部13とを有し、2値化処理部12は、2次微分フィルタBFを有しており、入力画像GD1に2次微分フィルタBFによるフィルタリングを行った結果におけるゼロクロス点を基準として、入力画像GD1を2値化する。
(もっと読む)
特徴点検出装置、およびそれを搭載した動画像処理装置
【課題】一定の精度を確保しつつ、簡単な演算処理で特徴点を検出したい。
【解決手段】二次微分値算出部10は、画像内の注目画素における、右下がり斜め方向の二次微分値および右上がり斜め方向の二次微分値を算出する。評価値算出部20は、二次微分値算出部10により算出された、右下がり斜め方向の二次微分値と右上がり斜め方向の二次微分値との絶対値差を第1評価値として算出する。判定部30は、評価値算出部20により算出された第1評価値と、第1閾値とを比較することにより、注目画素が画像内の、コーナーまたは斜めエッジに該当するか否か判定する。
(もっと読む)
画像処理装置、画像処理プログラム、および画像処理方法
【課題】マッチング処理時間を短縮し、高精度のマッチングを行う画像処理装置を提供する。
【解決手段】第1基準領域と第1参照領域とから画像信号と被写体の距離情報を抽出し、第1基準領域と第1参照領域との被写体距離差に基づいて、第1基準領域と第1参照領域とが類似するかどうか予備判定を行う。そして、予備判定によって、第1基準領域と第1参照領域とが類似すると判定した場合にのみ、第1基準領域と第1参照領域との類似性を示す値を算出し、マッチングを行い、第1基準領域と類似する第1参照領域を決定する。
(もっと読む)
画像処理装置
【課題】 入力された画像に対して文字・線画部の判定を行う画像処理装置において、文字・線画エッジ部に適応的な処理を施すことを可能とする。
【解決手段】 文字・線画エッジ部の内エッジ領域・外エッジ領域の抽出を行い、内エッジ領域をエッジの外側方向に、外エッジ領域をエッジの内側方向に拡張させることによって、文字エッジの内側または外側に近接する任意の幅の領域を判定する方法を用いる。
(もっと読む)
画像処理装置、画像処理方法およびコンピュータプログラム
【課題】少ない演算量で特徴点を正確に検出することが可能な画像処理装置を提供する。
【解決手段】本発明の画像処理装置100は、画像が入力される画像入力部110と、入力された画像の特徴点を検出する特徴点検出部120と、を備える。かかる画像処理装置100の特徴点検出部120は、画像における任意の一の画素である注目画素の周辺領域における輝度値の1次微分値を算出する1次微分値算出部122と、1次微分値に対する2次微分値を算出する2次微分値算出部124と、1次微分値および2次微分値に基づいて特徴点を検出する検出部126と、を備えることを特徴とする。単純な1次微分値と2次微分値の演算処理の組み合わせにより特徴点を検出することができるので、演算量を軽減することができ、かつ高性能に特徴点を検出することができる。
(もっと読む)
画像処理方法及びその方法を用いた画像処理装置
【課題】グレー階調画像のエッジ(輪郭線)を抽出する方法および装置において、ラプラシアンのゼロ交差を検出する手法によって生じる問題点を回避し、的確にエッジを抽出することが可能な画像処理方法および装置を提供する。
【解決手段】本発明の画像処理方法は、X−Y平面における位置(x,y)でのグレー階調値zがz=f(x,y)によって与えられる画像データから輪郭線を検出する画像処理方法において、z=f(x,y)のグラジエント方向の二次微分の値がゼロ交差する点の集合を抽出し、当該集合を画像の輪郭線として検出することを特徴とする。
(もっと読む)
学習装置および方法、認識装置および方法、並びにプログラム
【課題】より確実に画像から対象物体を検出できるようにする。
【解決手段】服装特徴量計算部22は、学習画像から抽出された各服装特徴点について、服装特徴点と他の服装特徴点とのペアリングを行とともに、各ペアについて、2つの領域のテクスチャの距離を1つのペアの服装特徴量として求める。服装識別器生成部23は、服装特徴量を用いた統計学習により、画像から対象物体を検出する服装識別器を生成する。輪郭識別器生成部26は、学習画像から抽出された輪郭特徴点の輪郭特徴量を用いた統計学習により、画像から対象物体を検出する輪郭識別器を生成する。統合識別器生成部27は、服装識別器と輪郭識別器とを線形結合して、統合識別器を生成する。本発明は、人認識システムに適用することができる。
(もっと読む)
複数の外見モデルを用いた多姿勢顔追跡
【課題】ビデオシーケンスの複数のフレームを通じて移動する顔を追跡するシステム及び方法を提供する。
【解決手段】ビデオフレーム中の顔の予測位置が得られる。カラーモデル及びエッジモデルの両方の類似度マッチングが行われ、予測位置の周囲でそれぞれの相関値が導出される。次に、相関値が結合されて、ビデオ中の顔を追跡するための最良の位置及びスケール一致が求められる。
(もっと読む)
機器制御装置及び制御方法
【課題】リモコンが手元にない場合や故障等して使用できない場合でも操作性よく対象機器を制御することを目的とする。
【解決手段】撮像装置において撮像された画像から対象物体の画像を背景画像として検出する背景画像検出手段と、撮像装置において撮像された画像から対象物体に係る指画像を検出する指画像検出手段と、対象物体に対する指示動作に係る指示位置を、背景画像として検出された対象物体の形状画像と、指画像と、の相対位置関係から算出する算出手段と、指示位置に応じて、対象機器の操作に係る操作項目が選択されたか否かを判定する判定手段と、判定手段において操作項目が選択されたと判定された場合、選択された操作項目に係る制御コマンドを対象機器に送信するコマンド送信手段と、を有することによって課題を解決する。
(もっと読む)
画像認識による計測方法および記録媒体
【課題】 画像認識において、背景による各種外乱の影響を取り除き安定したパターン検出を可能とし、パターンマッチングの処理負荷を削減し処理時間を短縮させる。
【解決手段】 対象物と背景とを分離しそれらの濃度として各原画像の平均濃度を指定する。予めパターン画像の自己相関係数の計算を行う。パターン画像によるスキャン過程で、入力画像の自己相関係数とパターン画像・入力画像間の相互相関係数を計算する。パターン画像から背景部分を除外して対象部分のみでパターンマッチングを行うことにより、背景の外乱の影響が取り除け、計算時間も短縮する。
(もっと読む)
1 - 20 / 32
[ Back to top ]