
Fターム[5L096JA20]の内容
Fターム[5L096JA20]に分類される特許
21 - 25 / 25
画像処理装置、画像処理方法、ならびにプログラム、記憶媒体

【課題】 画像特徴量に基づいて類似画像を検索をする場合において、画像特徴量の位置情報を考慮しつつ、当該位置情報にある程度の違いがあった場合でも、高精度かつ高速に検索できるようにすることを目的とする。
【解決手段】 異なる画像データの類似度を算出する画像処理装置であって、該異なる画像データをそれぞれ複数のブロックに分割し、該ブロックごとに取得された該各画像データの特徴量に基づいて、それぞれの特徴量行列を生成する第1の生成手段と、該生成された特徴量行列を構成する各特徴列間の距離をDPマッチングを用いて算出する算出手段と、該算出された特徴列間の距離を2次元に配列することでラインペナルティマトリックスを生成する第2の生成手段とを備え、前記異なる画像データの類似度を、該ラインペナルティマトリックスを用いてDPマッチングにより算出することを特徴とする。
(もっと読む)
ジェスチャー認識方法

【課題】ジェスチャー認識処理を高速化して複数の人物のジェスチャー認識を可能にする。
【解決手段】全方位視覚センサにより複数の被写体を撮像し、その撮像結果から個々の被写体画像を取り出して、画像処理装置によりジェスチャー認識する。
(もっと読む)
未知の多次元データ内のパターンを発見するためのコンピュータ化された方法
【課題】本方法は、未知の多次元データ内のパターンを発見するものである。
【解決手段】多次元データの時系列が生成され、時系列の自己相関をとることにより、点横断距離マトリクスが構成される。複数の時間分解能において、点横断距離マトリクス内の全ての最小コスト経路が見つけられる。そして、未知の多次元データ内の高レベルのパターンを発見するために、最小コスト経路が、多次元データ内の時間的な部分列に関連付けられる。  (もっと読む)
(もっと読む)
適応型である点ベースの弾性的画像照合
本発明は、点ベースの弾性的照合パラディグムを改善することを目的とする。本発明によれば、例えば、正規分布形状の力を伴う力場が、変形される画像に対していくつかの点において適用される。この場合、ランドマークの一致が必要とされることはなく、ソース画像とターゲット画像との差を最小にする、力の適用点の最適な位置が自動的に見つけられる。有利には、これは個別の制御点の局所的な影響を制御することを可能にすることができる。 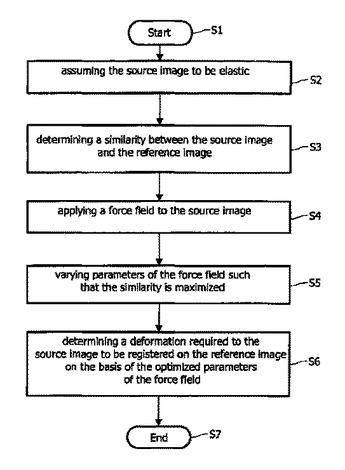 (もっと読む)
(もっと読む)
構成要素に基づいた物体の同一性確認システムを訓練するシステム及び方法
構成要素に基づいた顔認識システムを訓練するために、事例として用いる構成要素を決定するシステムと方法が提示される。一つの実施形態においては、構成要素の初期の形状と大きさが決定され、訓練集合が構築され、構成要素認識分類器が訓練され、そして分類器の精度が予想される。構成要素は四方向(上、下、左および右)のそれぞれの方向へ暫定的に拡張され、分類器の精度に及ぼす影響が決定される。その後、構成要素は分類器の精度を最大化する方向へ拡張される。処理は分類器の精度を最大化するために多数回実行しても良い。  (もっと読む)
(もっと読む)
21 - 25 / 25
[ Back to top ]