
国際特許分類[B23Q16/12]の内容
処理操作;運輸 (1,245,546) | 工作機械;他に分類されない金属加工 (71,475) | 工作機械の細部;構成部分,または付属装置,例.倣いまたは制御装置;特定の細部または構成部分の構造により特徴づけられる工作機械一般;特定の結果を目的としない金属加工機械の組合わせ (8,929) | 他に分類されない工具または工作物を特定の位置に正確に位置決めする装置 (123) | 割出し装置 (118) | 光学系を用いるもの (1)
国際特許分類[B23Q16/12]に分類される特許
1 - 1 / 1
ロータリテーブルの回転角度較正方法
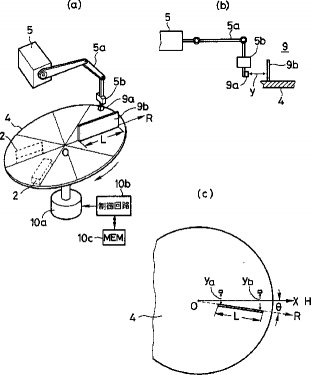
【目的】 ロータリテーブルによるワークの自動供給装置において、メモリに記憶されたテーブルの角度データを較正する。
【構成】 自動搬送機構に設けられたロボット機構5のハンドアーム5a に光学式の変位センサ9a を、また、テーブル4の半径ORの方向に回転角度の基準を示す基準反射板9b をそれぞれ設ける。ロータリテーブル4の中心Oを通るX軸を固定側の基準線とし、メモリに記憶された基準角度データを制御回路に与えてテーブルを回転し、基準反射板をX軸に一致させて停止する。変位センサ9a をX方向に移動して基準反射板の両端のY座標値ya,yb をそれぞれ測定し、両Y座標値の差と両端間の長さLとによりX軸に対する基準反射板のズレ角度θを算出し、これをメモリ10c に与えて記憶された各角度データを較正する。
(もっと読む)
1 - 1 / 1
[ Back to top ]