
国際特許分類[B25J9/22]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | プログラム制御 (534) | 記録または再生システム (483)
国際特許分類[B25J9/22]に分類される特許
481 - 483 / 483
ロボットティーチング棒
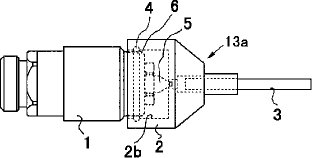
【課題】ロボット塗装において、スプレーガンを使用して塗装ロボットの近距離塗装のティーチングを行う場合に、吹き付け距離の近距離設定が容易に行えると共に、万一塗装物と接触した場合においても、塗装物の破損/落下・コンベアの損傷、あるいはスプレーガンの損傷・ロボットの故障・ティーチング棒の折損等の異常を生じてしまうことのないティーチング棒を提供する。
【解決手段】ロボット塗装時のスプレーガンの先端に取り付けするためのホルダーに棒状の可撓性部材をスプレーパターンの中心方向を示すように取り付けた。また、前記可撓性部材が片側に等間隔に突起部を形成した樹脂製の帯状体を該突起部同士が噛み合うように折り曲げて棒状にした。
(もっと読む)
溶接ロボット

【目的】 操作性に優れ、教示精度がよく、かつ溶接作業に先立って高精度にワークの位置検出を行うことができ、これにより、教示装置で教示された点で結ぶ溶接作業線に沿って正確に溶接を行うことができるようにする。
【構成】 所定の自由度を有するアーム部材の先端に指示具を装着し、この指示具でワーク上の溶接線を指示することによりロボットアームの動作を教示するようにした教示装置と、溶接線を検出する検出装着とを溶接ロボットのロボットアームの先端部に装着し、前記検出装置からの検出からの検出信号を受けて、教示装置からの信号による教示動作を補正する制御手段を設けた構成となっている。
(もっと読む)
ロボツト・プログラミング方法
【目的】動力学的解析に基づいたロボット・プログラミング方法を提供する。
【構成】実際の人間の動きを分析し、分析の結果得られた人体の実際の動きを解析して得られる関節に加えられる力とトルク等の知識を用いて、プログラマの希望する新しい動作についてのプログラムを設計する。本発明の方法は、動力学、制約条件、逆動力学の3つの段階に分かれており、第1番目の動力学の段階では、機械の各要素を区別してその動きを動力学方程式の形で取り出す。第2番目の制約条件の段階では、要素の相互結合関係及びそれぞれの動きの範囲を含む制約条件をチェックする。第3番目の逆動力学の段階では、これらの制約条件によりチェックされた動き及び力を動力学方程式を用いて計算し、この動きや力などの結果を表示する。
(もっと読む)
481 - 483 / 483
[ Back to top ]