
国際特許分類[B60L15/20]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 電気的推進車両の推進装置;車両用磁気的懸架または浮揚装置;電気的推進車両の変化の監視操作;電気的推進車両のための電気安全装置 (20,799) | 電気的推進車両の推進,例.牽引モータの速度,の所定の駆動を行うための制御をする手段,回路または装置;定置場所,車両の他の場所または同じ列車の他の車両からの遠隔操作のための電気的推進車両における制御装置のためのもの (2,227) | 所定の駆動,例.速度,トルク,計画された速度変化,を行なうよう車両またはその駆動モータを制御するためのもの (1,496)
国際特許分類[B60L15/20]の下位に属する分類
相互関連したスイッチを順次操作するようにしたもの,例.リレー,コンタクタ,プログラムドラム (8)
サーボモータにより駆動される主制御器をもつもの
ラチエット機構で駆動される主制御器をもつもの
無接点式のもの,例.トランスダクターを用いるもの (5)
手動制御に変える手段をもつもの (1)
国際特許分類[B60L15/20]に分類される特許
1 - 10 / 1,482
ハイブリッド自動車のトルク制御方法及びそのシステム
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
電動車両の制御装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
車両制御装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
電気自動車用モータ制御方法
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
動力伝達機構の制御装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
ハイブリッド自動車の制御装置
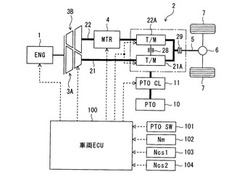
【課題】変速機の機構に負担を負わせることなく、速やかにPTO装置の作動を開始する。
【解決手段】デュアルクラッチ式変速機2と、第1歯車機構21Aの第1入力軸に第1主クラッチ3Aを介し第2歯車機構22Aの第2入力軸に第2主クラッチ3Bを介して接続されるエンジン1と、第2入力軸に装備されたモータ4と、PTOクラッチ11を介して第2歯車機構に接続されたPTO装置10と、第1入力軸と連結される第1歯車機構の第1のカウンタ軸と、第2入力軸と連結される第2歯車機構の第2のカウンタ軸と、をそなえ、変速機2に、出力クラッチと、第1及び第2のカウンタ軸を連結可能なクラッチとが備えられ、制御手段100が、PTOクラッチの接続指示がなされたら、第1及び第2主クラッチ及び出力クラッチを遮断してから、回転数がゼロとなるようにモータに停止指示をし、第2のカウンタ軸回転数がゼロとなったらPTOクラッチ11を接続する。
(もっと読む)
電動車両制御装置・制御方法・および電動車両

【課題】 適切なスリップ防止が行えて、タイヤのグリップ力を最大限に利用できる電動車両の制御装置、制御方法、および電動車両を提供する。
【解決手段】 上位制御手段21より与えられるトルク指令値に従い走行用のモータ8の駆動を制御するインバータ装置22を備える。モータ8で駆動される車輪の角加速度を検出する回転検出手段39を設ける。インバータ装置22に、前記の検出された角加速度の上限値を車両重量と出力トルクとの関数として設定し、この設定された上限値を、前記回転検出手段39で検出された角加速度が超えた場合に、トルク指令値を低減させるスリップ対応制御手段40を設ける。
(もっと読む)
移動車両及び非接触電力伝送装置
【課題】大型化及びコスト上昇を招くことなく、大きさやコイルの取り付け位置が異なっていても非接触での電力伝送を効率的に行うことができる移動車両及び非接触電力伝送装置を提供する。
【解決手段】移動車両としての電気自動車2は、移動のための動力を発生するモータ21と、モータ21を駆動する電力を供給する蓄電池24と、外部の給電コイル14から非接触で給電される電力を受電する受電コイル25と、受電コイル25で受電された電力の電力量を示す受電量を求める電力量演算器30と、電力量演算器30で求められた受電量を参照しつつモータ21を制御して受電コイル25に対する給電コイル14の位置を調整する制御部32とを備える。
(もっと読む)
自動車
【課題】 その場回転または横方向移動等の非通常走行形態で走行できる自動車において、非通常走行形態と通常走行形態の間での走行形態の切り換えが、運転者が意図した状態で行えて、不測に切り換わることがないようにする。
【解決手段】 3輪以上の車輪1,2を有し、全車輪1,2に独立して転舵可能な転舵機構4を有し、各車輪1,2のうちの駆動輪は、各々独立して原動機6を含む走行駆動機構5により走行駆動される。これにより、その場回転や横方向移動となる非通常走行の運転を可能となる。この前提構成の自動車において、通常走行運転モードと非通常走行運転モードとの切換を、運転者の操作によって切り換える走行モード切換手段41を設ける。
(もっと読む)
鉄道列車の運転曲線の作成方法
【課題】 鉄道列車の粘着引張力という客観的な指標に基づいた運転曲線の作成方法を提供する。
【解決手段】 鉄道列車の運転曲線の作成方法において、鉄道列車の力行が開始されると、ノッチ毎の引張力曲線データの提供(ステップS11)と、粘着引張力データの提供(ステップS12)とに基づいて引張力曲線と粘性引張力との比較を行う(ステップS13)。次いで、その比較により、その速度における鉄道車両の有効なノッチのうち最大のものを選択する(ステップS14)。次に、一定時間、該当するノッチを保持する(ステップS15)。上記したステップを繰り返し、次いで、力行が終了する(ステップS16)と、エンドとする。
(もっと読む)
1 - 10 / 1,482
[ Back to top ]