
国際特許分類[B62D57/028]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 車輪または軌道帯以外の他の推進装置または接地装置を単独または車輪または軌道帯に加えて有することを特徴とする車両 (133) | 接地推進装置を持つもの,例.足踏部材 (133) | 車輪の他に機械的脚をもつもの (7)
国際特許分類[B62D57/028]に分類される特許
1 - 7 / 7
クランク付車輪を備える車両
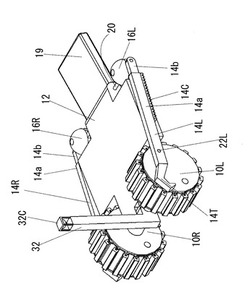
【課題】平地での滑らかな移動性と荒れ地での高い不整地踏破性があり、車輪型車両の堅牢性と防塵防水性を発揮する移動機構を提供すること。
【解決手段】 車両における車輪10Lおよび車輪10Rにおいて、タイヤのトレッド部に直交する外側サイドウォール部に連なるホイールには、伸縮可能なリンク部材14L、14Rの一端が連結されており、リンク部材14L,14Rの他端が、球形自在車輪16Rが設けられる支持軸20の一端に回動可能に連結されているもの。
(もっと読む)
走行ロボット

【課題】簡素な構成で、走破性と精密作業性を両立するための技術を提供する。
【解決手段】走行ロボット1は、台車3とアームユニット4を備えている。台車3は、台車本体5と、台車本体5に取り付けられた右駆動輪6a及び左駆動輪7aと、右駆動輪6a及び左駆動輪7aを平面視で結んだ直線Lを挟むように、台車本体5に取り付けられた前輪8a及び後輪9と、を有する。前輪8aは、前輪8aの回転軸と、台車本体5と、の鉛直方向における相対的な位置関係が変動可能となるように台車本体5に弾性的に支持されている。後輪9は、後輪9の回転軸と、台車本体5と、の鉛直方向における相対的な位置関係が変動不能となるように台車本体5に支持されている。アームユニット4による作業の際は、走行ロボット1全体のZMPが、右駆動輪6a及び左駆動輪7aと、後輪9と、を平面視で結ぶことで特定される多角形領域Aの内側に留まるようにした。
(もっと読む)
車輪型移動体
【課題】歩行者に追従して移動可能な移動体を提供する。
【解決手段】 この移動体10は、本体20と、本体の右側面に設けられた第1車輪12bと、第1車輪を回転させる第1駆動モータ14bと、本体に対して第1車輪を上下方向に相対移動させる第1上下方向移動機構24bと、本体の左側面に設けられた第2車輪12aと、第2車輪を回転させる第2駆動モータ14aと、本体に対して第2車輪を上下方向に相対移動させる第2上下方向移動機構24aと、本体に設けられており、第1及び第2車輪に対して本体の前後方向に隔てられた位置に配置されている第3車輪18と、第1駆動モータ、第1上下方向移動機構、第2駆動モータ及び第2上下方向移動機構を制御する制御部と、を有している。第3車輪18は、従動輪であり、かつ、全方位輪又は球面キャスタである。
(もっと読む)
無方向性ロボット
【課題】 人間に代わって悪環境下での移動・複雑な作業を行うために利用される無方向ロボットを提供する。
【解決手段】 サーボモータを二個用いた二自由度のアームによって任意の方向に重りを移動させ、進行方向に重心位置をずらして任意の方向に進む手段と、対面する頂点に駆動輪とキャスタを持ち、全ての面が同様の移動機構を持ち、各面に二つの駆動輪で旋回と移動を行い、箱の内部に姿勢認識装置を組み込んで、機体の姿勢が変化する際に転がり重さによってセンサーの認識した方向の面を接地面として対応した動輪を回転させる手段と、三角錐全ての頂点に動輪を配置し、車輪方向へ回転するローラを8個備えた特殊なホイールを使用しており、ホイールを各面に3個配置されてその駆動輪のベクトルの合力を任意の進行方向に向ける全方向移動を行う手段、を備える。
(もっと読む)
2輪型投擲用ロボット
本発明は、2つの駆動輪を有する2輪型ロボットに関するもので、本体に密着または分離する支持脚の端部を鋭く尖らし、かつ鋭く尖った端部は摩擦力が最小となるように曲面に形成し、支持脚にバッテリの設置空間を提供するカバーを一体に設置して、段差を乗越える途中支持脚が段差に引っ掛ることを防止して円滑に段差を乗越えるようにすることで、2輪型投擲ロボットが安定的に移動できるようにする。 (もっと読む)
移動ロボット
【課題】段差の上面や斜面の摩擦係数が低い場合であったとしても、踏破して移動することが可能である移動ロボットを提供する。
【解決手段】多関節脚車輪10は、固定可能に回動する第一関節駆動軸12を介して車体2に支持された回動脚部11と、固定可能に回転する駆動輪13が両端部分20aに配置され且つ中央部分20bが回動脚部11に固定可能に回動する第二関節駆動軸15を介して支持される旋回脚部20を備え、多関節脚車輪10には、旋回脚部20を走行面Aに沿わせるべく寝かせる段階で該走行面Aと対向する旋回脚部20の一方の面20cに位置して、走行面Aに引っ掛かるないし食い込む突起21を設けた。
(もっと読む)
移動ロボット及びその制御方法
【課題】多関節脚車輪の先端に配置した旋回脚部の両端に位置する車輪の接地制御を簡単な操作で安全且つ迅速に行うことができる移動ロボット及びその制御方法を提供する。
【解決手段】車体2に水平軸回りに回動可能で且つ固定可能に支持された回動脚部11と、固定可能に正逆回転する駆動輪13が両端部分に配置されていると共に中央部分が回動脚部11の先端部分に対して水平軸回りに回動可能で且つ固定可能に支持された旋回脚部20を具備した多関節脚車輪10と、駆動輪13の接地状態を判定する接地検出センサ15を備え、接地検出センサ15が、一方の駆動輪13のみが接地していると判定すると接地している駆動輪13を制御対象として制御し、両方の駆動輪13が接地していると判定するとこれらの駆動輪13の接地状態を維持するべく制御し、両方の駆動輪13が接地していないと判定すると制御対象となる駆動輪13を自動的に選択する制御部4を設けた。
(もっと読む)
1 - 7 / 7
[ Back to top ]