
国際特許分類[G03B37/02]の内容
物理学 (1,541,580) | 写真;映画;光波以外の波を使用する類似技術;電子写真;ホログラフイ (245,998) | 写真を撮影するためのまたは写真を投影もしくは直視するための装置または配置;光波以外の波を用いる類似技術を用いる装置または配置;そのための付属品 (67,505) | パノラマまたはワイド・スクリーン写真;広範囲面撮影,例.測量用;内部表面撮影,例.管の (415) | レンズまたはカメラの走査運動をもつもの (14)
国際特許分類[G03B37/02]に分類される特許
1 - 10 / 14
撮像装置
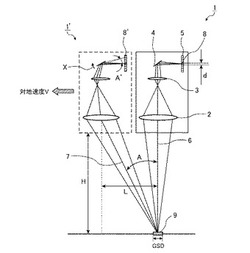
【課題】小さな視線走査光学素子を用いることが可能であり、視線走査光学素子によるモーメント変動を抑制し、撮像装置の姿勢を安定させることで高分解撮像ができる撮像装置を提供する。
【解決手段】被写体からの入射光を検出する検出器5と、入射光の焦点を検出器5上の位置に合わせる光学系(2,3)と、光学系(2,3)の射出瞳側に配置され、撮像装置1の移動に起因する入射光の焦点の位置の移動を修正する視線走査光学素子4とを備える。
(もっと読む)
画像処理装置、画像処理方法、及び、プログラム

【課題】不自然なパノラマ画像が得られることを、容易に防止する。
【解決手段】パノラマ合成部53は、移動量検出部56において撮像画像の画像処理によって検出される、撮像装置の移動量である画像処理移動量と、移動量検出部20において動きセンサ19が出力するセンサ信号から検出される、撮像装置の移動量であるセンサ移動量とを合成した合成移動量を用いて、複数の撮像画像を合成し、パノラマ画像を生成する。速すぎ検出部62は、画像処理移動量よりも検出範囲が広いセンサ移動量に基づき、撮像装置が移動する速さが速すぎるかどうかを検出し、撮像制御部63は、撮像装置が移動する速さが速すぎることが検出された場合、パノラマ画像の生成に用いる撮像画像の撮像処理を中断する。本発明は、例えば、パノラマ画像の撮影に適用することができる。
(もっと読む)
壁面、天井面を高精細に再現できる撮影方法
【課題】壁面やレンズ面の歪みを考慮して撮影することにより、実際の壁面や天井面に描かれた文化財をデジタル情報として、歪み無く高精細に記録保存することを課題とする。
【解決手段】本発明は、ラインカメラと壁面の距離とを設定する距離設定手段と、壁面の全幅を設定する全幅設定手段と、距離設定手段と全幅設定手段で設定された数値を用いて回転手段の副走査速度を設定する回転速度設定手段と、からなることを特徴とする。
(もっと読む)
キャリブレーション方法およびキャリブレーション装置
【課題】機器の設置時点で厳密な位置調整を行わなくても、カメラ投影中心と回転中心とを一致させる。
【解決手段】並進ステージと回転ステージを移動させて世界座標値が既知な対象物を撮影し、各々の画像と撮影した対象物の世界座標値、撮影した時の並進位置、回転位置とから各画像の投影中心座標を求め、前記求めた前記投影中心座標に最も当てはまる1枚の平面を求め、前記各投影中心座標から前記平面へ下ろした垂線の足を新たな投影中心座標とし、前記求めた前記平面上の前記新たな投影中心座標と、それらの投影中心座標を求める元となった画像が撮影されたときの並進位置、回転位置とから前記水平方向の回転移動の中心位置を算出し、前記カメラの投影中心位置が前記算出した回転中心と一致するように、前記ステージの水平位置を変更する。
(もっと読む)
光学装置、撮像装置、制御方法、及びプログラム
【課題】第1の光学系により取り込まれる画像と、第1及び第2の光学系を合成した合成光学系により取り込まれる画像を同時に撮影可能とし、小型且つコストを低減可能とした光学装置を提供する。
【解決手段】光学装置は、第1の光学系1と第2の光学系2を備える。撮影画角を90°以上有する屈折光学系である広角レンズ又は魚眼レンズ作用を有する第1の光学系1の物体側に、第1の光学系1にて結像される画像範囲の内側にもう1つの撮影画像を形成する第2の光学系2を配置する。第2の光学系2の反射部材7を回転駆動し、任意の偏向角度を設定可能とする。第2の光学系2における物体側に配置される光学系を少なくとも含むように光軸の周りに回転駆動可能とする。第2の光学系2を通過させた被写体像を第1の光学系1の物体側に1次結像させた後、第1の光学系1を通過させて2次結像を行う。
(もっと読む)
ネットワークカメラシステム
【課題】広角レンズを有するネットワークカメラを使用する場合でも、複数枚の画像の繋ぎ目が合致するパノラマ画像を生成することができるネットワークカメラシステムを提供する。
【解決手段】ネットワークカメラシステムは、ズーム制御可能な広角レンズを有するネットワークカメラ101とそれを制御するPC103とがネットワーク102を介して接続される。そして、PC103は、ネットワークカメラ101が撮影した複数枚の画像を繋ぎ合わせることによりパノラマ画像を生成するパノラマ生成部303を備える。また、パノラマ撮影モード時に、ネットワークカメラ101のレンズを所定の位置に移動させる遠隔ズーム手段としてのコマンド生成部306を備える。
(もっと読む)
撮像装置
【課題】周辺360度の様子を常に同時に撮像することができ、かつ撮像された画像に対して超解像処理を施すことにより、撮像画像の全部または一部の実質解像度を向上させることができるカメラ装置を提供する。
【解決手段】全周カメラ部101は、カメラの周囲360度の様子を動画像として撮像する。モータ部102は、全周カメラ部101に接続され、全周カメラを所定の方法、速度で回転させる。回転制御部103は、モータ部102の回転方法や回転速度を制御する。このようにして全周カメラ部101で撮像された動画像は、画像処理部104に対して出力される。画像処理部104では、全周カメラ部101で撮像された動画像に対して、超解像処理を行う。
(もっと読む)
姿勢角検出装置、カメラ
【課題】搭載重量が少なく、搭載スペースが小さい移動体でも姿勢角を計測できるようにすることを目的とする。
【解決手段】まず、水平線検出部9はカメラシステム7により撮影された移動体の前後映像と側方映像とから水平線を抽出する。次に、水平線検出部9は前後映像における水平線の位置と側方映像における水平線の位置とに基づいてピッチ角φとロール角θとを算出する。また、目標抽出部11は前後映像と側方映像との少なくともいずれかから既知物を抽出する。次に、目標抽出部11は前後映像または側方映像に基づいて移動体から既知物への方向を示すベクトルP1を算出する。また、姿勢角算出部14はGPS33により測位された移動体の測位座標と既知物の既知座標とに基づいて移動体から既知物への方向を示すベクトルP0を算出する。そして、姿勢角算出部14はベクトルP0とベクトルP1とピッチ角φとロール角θとに基づいてヨー角ψを算出する。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】パノラマ画像を容易に撮影することができるようにする。
【解決手段】ディジタルカメラ1にはX−Yアドレス型の撮像素子と、それぞれのラインの露光時に撮像素子に加えられた変位を検出するセンサが設けられている。その撮像素子においては、ライン単位で露光が行われ、ユーザは、露光を行うラインの切り替え方向と同じ方向にパンしながら撮影を行う。それぞれのラインの露光のタイミングが異なることによって、撮像結果の1枚の画像には、広い範囲の被写体が縮まった状態で取り込まれる。撮像結果の1枚の画像を、センサによって検出された変位に応じて拡大することによって1枚のパノラマ画像が生成される。本発明は、X−Yアドレス型の撮像素子と変位を検出するセンサが設けられている機器に適用することができる。
(もっと読む)
撮像装置及び撮像方法
【課題】 重ね合わせ撮影を容易に行うことができ、画像編集を簡略化することができる撮像装置及び撮像方法を提供すること。
【解決手段】 撮像装置100は、被写体を撮影する撮像部101と、撮影画像を記憶する記憶部102と、撮影方向をずらしながら被写体を撮影する重ね合わせ撮影時に、撮像部101により撮影される画像に記憶部102に記憶されている画像の一部を重ね合わせる合成部103と、画像重ね合わせのための表示領域の大きさ等を設定する合成調整部104と、合成画像を表示する画像表示部105とを備え、撮像部101により撮影される画像に、記憶部102に記憶されている画像の一部を重ね合わせて表示する。ユーザはこの重ね合わせ画像を見ながら撮像部101の方向を調整して撮影を行う。
(もっと読む)
1 - 10 / 14
[ Back to top ]