
クレーンの制御方法
本発明は、クレーンの制御方法に関するもので、クレーンのフックに接続されたロープ部分(13)の摩擦作動式駆動ホイール(3)による制御を含み、余分のロープを収納リール(12)に複数層に巻き付ける。本方法では、2つの機械装置(1、2)を使用し、それらのうち第1のもの(1)を駆動ホイール(3)用とし、他方のもの(2)を収納リール(4)用として、一方の機械装置(1、2)を速度指令により、他方の機械装置(1、2)をトルク指令により制御する。
【発明の詳細な説明】
【発明の背景】
【0001】
本発明は、クレーンの制御方法に関するもので、本方法は、クレーンのフックに接続されたロープ部分の摩擦作動式駆動ホイールによる制御を含み、余分のロープを収納リールに複数層に巻き付け、それは2つの機械装置を使用することによってなされ、それらのうちの第1のものを駆動ホイール用とし、他方のものを収納リール用としている。
【0002】
吊り上げ装置において、巻き上げロープは、巻き上げフックが上部位置にある場合、一般的にドラムに単層に巻き付けられる。しかし、さらに公知の方式では、余分のロープが収納リールに巻き付けられる。これらの方式においては、十分な摩擦が駆動ホイールおよび綱車によって達成され、それは、たとえば螺旋バネにより生成される僅かな力だけを、ロープを収納ホイールに硬く締め付けるのに必要とすることによってなされる。一方式では、ロープを駆動ドラムに対して直接的に複数層に巻き付ける。
【0003】
しかし、とくに極端に高い吊り上げ高さでは、ロープを単層にする場合、ロープドラムが長くなる。このため、大きなスペースがドラムに必要であり、強度理論的に丈夫な構造が必要となる。また、ドラムの長さは、フックの高さに応じてロープをぶらつかせることにもなる。ドラム方式では、ロープの角度が大きくなり、ロープの作動寿命を短くしている。ロープ角度は、駆動ホイールまたはドラムからの離脱角を示すものである。上述のように収納リールを用いると、結果的に駆動ホイール機械装置におけるトルクを大きくする。しかし、収納リールを管理するには、ロープの緊張を調節するある種の装置を必要とする。吊り上げ高さが高い場合、螺旋バネは困難を生じる。また、ドラムに対して直接的に複数層に巻き付ける吊り上げ装置も、大きなトルクを必要とする。さらに、ロープは大きな力でリールに巻き付けられるので、ロープの作動寿命が低下する。
【発明の概要】
【0004】
本発明は、上述の欠点を解消することを目的とする。本目的は、機械装置のうちの一方を速度指令により、他方の機械装置をトルク指令により制御することを特徴とする本発明による方法によって達成される。
【0005】
本発明は、2つの機械装置を使用することを基本としている。機械装置は、電動機と、一般的にはギアとを含む。ギアレス方式も使用可能である。機械装置のうちの一方は摩擦作動式駆動ホイールを駆動し、第2の機械装置は複数層に巻き付ける収納リールを駆動する。駆動ホイールを制御する機械装置は速度指令によって調節され、収納リールの機械装置はトルク指令によって制御されることが望ましい。速度指令は、吊り上げ装置または運転を制御するコンピュータのユーザによって与えられる。速度指令は吊り上げフックの速度を制御する。
【0006】
本発明の方法は、収納リールに対してロープの緊張を調節する効率的なメカニズムを設けると同時に、摩擦作動式駆動ホイールの従来技術におけるよりも小さなトルクが達成される。また、小型で、強度理論的に望ましい構造も達成される。ロープの鋭角が回避されるので、ロープの作動寿命が改善する。ロープの姿勢は、本発明の装置において吊り上げ高さとの関係でぶらつくこともない。本発明において、ロープの作動寿命は、収納リールに対するロープの緊張力を、直接的にリールに巻き付ける吊り上げ装置におけるよりも小さくすることによって延長される。
【0007】
本発明の方法の好ましい実施例において、収納リールのトルク指令は、ロープが一つの層から他の層へと移るとき、収納リールと摩擦駆動ホイールとの間のロープ部分における力を一定に保つように変更される。さらに、摩擦駆動ホイールと収納リールとの間のロープの力は、摩擦駆動ホイールからフックへ走るロープ部分の値の半分に保たれる。しかし、さまざまな種類の関係を使用することもできる。トルクは、ロープが収納リールにおける層を変えるときに変化する。更なる層への移行がなされる場合には、トルクは増大し、層が少なくなる場合には、トルクは減少する。ロープの層の変化点を管理するためには、位置に応じた層の変化点を有するテーブルを、機械装置を制御するコンピュータの記憶装置に保存する必要がある。この情報は学習走行によって最も容易に得られる。学習走行は、装置の実施化に際して行われる。
【0008】
本発明による方法の他の実施例において、収納リールは速度指令によって、駆動ホイールはトルク指令によって制御される。このため、制御用コンピュータは、ロープの長さに応じて収納リールの回転速度を変更するテーブルを含み、フックの速度が、与えられた速度指令の大きさでとどまるようにする。
【0009】
本発明の装置の好ましい実施例を、添付の請求項2ないし9に開示する。
【図面の簡単な説明】
【0010】
次に、本発明を、添付の図面を参照して、本発明の方法で好ましく用いられるクレーンに関連して、より詳細に説明する。
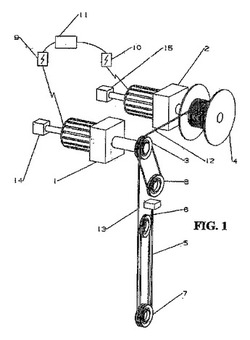
【図1】本発明の方法に用いられるクレーンの構造を示す図である。
【図2A】および
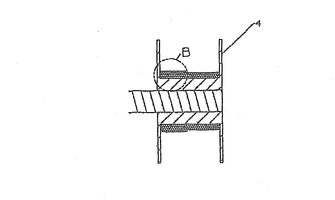
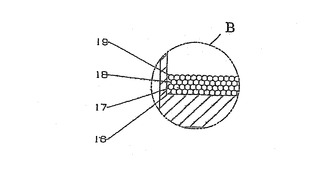
【図2B】収納リールの構造を示す図である。
【図3】速度指令を示す図である。
【図4】本発明によるクレーンの機械装置の制御を調節するコンピュータおよび電子機器の間の相互交信のブロック図である。
【発明の詳細な説明】
【0011】
図1は、本発明の方法に用いられるクレーンの構造をより詳細に示す。各部1および2は、機械装置として動作する。機械装置1は、電気駆動部9によって駆動し、機械装置2は電気駆動部10によって駆動する。電気駆動部は、代表的には周波数コンバータ駆動装置であるが、直流駆動装置を用いて、同様の発明を実現することができる。機械装置1は摩擦作動式駆動ホイール3を駆動し、機械装置2は収納リール4を駆動する。綱車8は、ロープに対して十分に大きな把持角度を得るのに必要なものである。把持角度を大きくすると摩擦力が増大する。綱車システム6および7は、必要なロープ力を小さくする従来のロープ伝動を構成している。クレーンのフック(図示せず)は、下部綱車システム7に固定されている。ロープ部分5はクレーンの上部構造の固定点に固定されている。機械装置のシャフトは角度センサ14および15を含み、それらは機械装置の速度情報および位置情報を供給する。位置情報は、とくに学習プログラムに関連して必要である。センサ14および15は、ロープ層が変化するとき、速度の変化を検出する。この構造は、270ないし360度の接触角を生み出す。図1を参照すると、ロープは、まず駆動ホイール3を周回し、次いで自由回転する綱車7を周回して、再び駆動ホイール3へ到達する。駆動ホイール3の有効接触角は270度であることが分かる。収納リール4を他の方式で配置することによって、たとえば360ないし540度の接触角を得ることができることが分かる。しかし、ここで重要なことは、接触角を小さく保つことである。リール4が引き抜き式のものでなければ、摩擦力を十分にするために必要な接触角は、従来技術において一般的であるように、約1000度となったであろう。今では、リール4を引き出す場合、駆動ホイール3に必要な摩擦力は、引き出し式リールがないよりも約半分小さい。このため、接触角は270ないし540度の範囲内にするのがよい。また、アンダカットのない半円形の溝を用いることができる。この場合、引き出し中のロープの摩耗が比較的少なくなる。これにより、ロープの作動寿命が改善される。また、駆動ホイールにおけるシャフトの力も適度になる。
【0012】
運転方式は、摩擦駆動ホイール3と収納リール4との間のロープ部分12における力が摩擦駆動ホイール3とフックとの間のロープ13の力と所定の関係にあるように作られている。この関係はたとえば半分であるが、また、他の関係を用いることもできる。これはロープ部分12の力を適切に調節することによって調整される。複数層に巻かれているリール4へと走るロープにおいて一定の力を発生させることが望ましい場合、リール4のロープ量と、さらには使用されているロープ層とに応じて、リール4のシャフトにさまざまなトルクが必要となる。これは、ロープ量が変化するにしたがって、リール4のシャフトとロープとの間の半径が変化するからである。半径は、リール4上に新規の層が作られ始めるとき、常に増大する。このため、トルク指令の変更が制御用コンピュータにおいて必要である。これを成功させるため、装置を制御するコンピュータは、リール4へ巻き付けられるロープの巻きがいつ変化するかを知る必要がある。この情報を得るために、学習プログラムがコンピュータで使用される。学習走行は機械装置2の一定速度で行われる。この場合、機械装置1は小さいトルク指令で駆動する。このため、クレーンは、コンピュータ11により制御されて、一定速度で吊り上げ移動の一端から他端へと駆動する。この場合、ロープが新規の層に巻き付けられ始めると、機械装置1の速度が常に変化する。コンピュータ11は機械装置のシャフトにおけるセンサ14および15によって位置および速度を監視する。その変化の検出点はコンピュータの記憶装置に保存される。これはテーブルにされ、それによって、収納リール4に必要なトルクの変更を、通常の運転において管理することができる。通常の駆動において、この層の情報を使用し、ロープ力を一定に保つように機械装置2のトルクを変更する。クレーンのフックに接続されたロープ部分13は、摩擦作動式駆動ホイールにより制御され、余分なロープは収納リール4に複数層で巻き付けられる。
【0013】
図2は、収納リールの構造を示す。ロープのさまざまな層は参照番号16、17、18および19で示す。
【0014】
図3は、速度指令トンネル20および21を示す。図3において、速度指令22は正数から負数までのさまざまな数値を受ける。曲線23は実現速度指令を示し、また、負の速度でのロープのスリップを示す。この場合、スリップを、速度指令トンネルの壁面に衝突する速度指令によって管理する。スリップは主として、負荷が小さい場合または無負荷駆動の場合に発生する。この場合、スリップを、収納リール4におけるトルクを大きくすることによって管理することができる。しかし、この場合、全トルクの必要性は小さく、収納リールにはトルク増大の余裕がある。
【0015】
図4において、ブロック28はユーザまたは他の制御から送られてくる速度指令を示し、速度指令は装置を通る信号36によって制御用コンピュータ11へと伝わる。さらに、コンピュータは、速度指令38を駆動ホイール3の電気駆動部9へ与える。駆動ホイール3の駆動部は、負荷により生じるトルクを監視し、それをさらに信号32によって加算部27へ送る。また、予張力情報26が信号33によって加算部27へ到着する。上記予張力情報は、無負荷状態の場合に駆動ホイール3と収納リール4との間のロープ12が緩まないようにするために必要である。ロープ12が緩んだ場合、収納リール4におけるロープの制御された巻き付けが妨げられる。吊り上げ装置に負荷がある場合、予張力情報はゼロでもよい。トルク指令は、予張力情報によって補正され、乗算部37へ送られる。第2の因子として、トルク除算係数35がこの乗算部へと到着する。コンピュータ11は、ロープ部分12および13におけるロープ力の比が所望のように保たれるように、この係数を演算する。最後のトルク指令31が乗算部37から収納リールの電気駆動部10へと送られる。収納リール4はその位置情報46を制御用コンピュータ11に与える。コンピュータは、上記位置情報を利用してロープ層の変化点に注意する。変化点が発生すると、コンピュータはトルク除算係数35を変更する。速度指令トンネルを作成するために、コンピュータ11は収納リール4に適した速度情報42を算出する。これは駆動ホイール3の速度39から得られ、それは乗算部41において速度係数40によって補正される。この係数40は収納リール4の状態およびその層によって左右される。許容速度誤差45が、加算部43において信号25による上記速度情報に付加される。これは速度指令トンネルの上縁30を生成する。同様の方式で、速度誤差が、差分部44において速度情報42から減算され、速度指令トンネルに対する下限29を生成する。ロープがスリップし、速度指令トンネルの縁に達した場合、収納リール4はそのトルクを増大して、ロープがさらにスリップしないようにする。
【0016】
上記の説明およびこれに関連した図面は、本発明の例証を意図したに過ぎないことがわかる。本発明を、添付の請求項に開示する本発明の保護の範囲および真意から逸脱しないで、さまざまに変更および改造できることは、当業者には明らかである。
【発明の背景】
【0001】
本発明は、クレーンの制御方法に関するもので、本方法は、クレーンのフックに接続されたロープ部分の摩擦作動式駆動ホイールによる制御を含み、余分のロープを収納リールに複数層に巻き付け、それは2つの機械装置を使用することによってなされ、それらのうちの第1のものを駆動ホイール用とし、他方のものを収納リール用としている。
【0002】
吊り上げ装置において、巻き上げロープは、巻き上げフックが上部位置にある場合、一般的にドラムに単層に巻き付けられる。しかし、さらに公知の方式では、余分のロープが収納リールに巻き付けられる。これらの方式においては、十分な摩擦が駆動ホイールおよび綱車によって達成され、それは、たとえば螺旋バネにより生成される僅かな力だけを、ロープを収納ホイールに硬く締め付けるのに必要とすることによってなされる。一方式では、ロープを駆動ドラムに対して直接的に複数層に巻き付ける。
【0003】
しかし、とくに極端に高い吊り上げ高さでは、ロープを単層にする場合、ロープドラムが長くなる。このため、大きなスペースがドラムに必要であり、強度理論的に丈夫な構造が必要となる。また、ドラムの長さは、フックの高さに応じてロープをぶらつかせることにもなる。ドラム方式では、ロープの角度が大きくなり、ロープの作動寿命を短くしている。ロープ角度は、駆動ホイールまたはドラムからの離脱角を示すものである。上述のように収納リールを用いると、結果的に駆動ホイール機械装置におけるトルクを大きくする。しかし、収納リールを管理するには、ロープの緊張を調節するある種の装置を必要とする。吊り上げ高さが高い場合、螺旋バネは困難を生じる。また、ドラムに対して直接的に複数層に巻き付ける吊り上げ装置も、大きなトルクを必要とする。さらに、ロープは大きな力でリールに巻き付けられるので、ロープの作動寿命が低下する。
【発明の概要】
【0004】
本発明は、上述の欠点を解消することを目的とする。本目的は、機械装置のうちの一方を速度指令により、他方の機械装置をトルク指令により制御することを特徴とする本発明による方法によって達成される。
【0005】
本発明は、2つの機械装置を使用することを基本としている。機械装置は、電動機と、一般的にはギアとを含む。ギアレス方式も使用可能である。機械装置のうちの一方は摩擦作動式駆動ホイールを駆動し、第2の機械装置は複数層に巻き付ける収納リールを駆動する。駆動ホイールを制御する機械装置は速度指令によって調節され、収納リールの機械装置はトルク指令によって制御されることが望ましい。速度指令は、吊り上げ装置または運転を制御するコンピュータのユーザによって与えられる。速度指令は吊り上げフックの速度を制御する。
【0006】
本発明の方法は、収納リールに対してロープの緊張を調節する効率的なメカニズムを設けると同時に、摩擦作動式駆動ホイールの従来技術におけるよりも小さなトルクが達成される。また、小型で、強度理論的に望ましい構造も達成される。ロープの鋭角が回避されるので、ロープの作動寿命が改善する。ロープの姿勢は、本発明の装置において吊り上げ高さとの関係でぶらつくこともない。本発明において、ロープの作動寿命は、収納リールに対するロープの緊張力を、直接的にリールに巻き付ける吊り上げ装置におけるよりも小さくすることによって延長される。
【0007】
本発明の方法の好ましい実施例において、収納リールのトルク指令は、ロープが一つの層から他の層へと移るとき、収納リールと摩擦駆動ホイールとの間のロープ部分における力を一定に保つように変更される。さらに、摩擦駆動ホイールと収納リールとの間のロープの力は、摩擦駆動ホイールからフックへ走るロープ部分の値の半分に保たれる。しかし、さまざまな種類の関係を使用することもできる。トルクは、ロープが収納リールにおける層を変えるときに変化する。更なる層への移行がなされる場合には、トルクは増大し、層が少なくなる場合には、トルクは減少する。ロープの層の変化点を管理するためには、位置に応じた層の変化点を有するテーブルを、機械装置を制御するコンピュータの記憶装置に保存する必要がある。この情報は学習走行によって最も容易に得られる。学習走行は、装置の実施化に際して行われる。
【0008】
本発明による方法の他の実施例において、収納リールは速度指令によって、駆動ホイールはトルク指令によって制御される。このため、制御用コンピュータは、ロープの長さに応じて収納リールの回転速度を変更するテーブルを含み、フックの速度が、与えられた速度指令の大きさでとどまるようにする。
【0009】
本発明の装置の好ましい実施例を、添付の請求項2ないし9に開示する。
【図面の簡単な説明】
【0010】
次に、本発明を、添付の図面を参照して、本発明の方法で好ましく用いられるクレーンに関連して、より詳細に説明する。
【図1】本発明の方法に用いられるクレーンの構造を示す図である。
【図2A】および
【図2B】収納リールの構造を示す図である。
【図3】速度指令を示す図である。
【図4】本発明によるクレーンの機械装置の制御を調節するコンピュータおよび電子機器の間の相互交信のブロック図である。
【発明の詳細な説明】
【0011】
図1は、本発明の方法に用いられるクレーンの構造をより詳細に示す。各部1および2は、機械装置として動作する。機械装置1は、電気駆動部9によって駆動し、機械装置2は電気駆動部10によって駆動する。電気駆動部は、代表的には周波数コンバータ駆動装置であるが、直流駆動装置を用いて、同様の発明を実現することができる。機械装置1は摩擦作動式駆動ホイール3を駆動し、機械装置2は収納リール4を駆動する。綱車8は、ロープに対して十分に大きな把持角度を得るのに必要なものである。把持角度を大きくすると摩擦力が増大する。綱車システム6および7は、必要なロープ力を小さくする従来のロープ伝動を構成している。クレーンのフック(図示せず)は、下部綱車システム7に固定されている。ロープ部分5はクレーンの上部構造の固定点に固定されている。機械装置のシャフトは角度センサ14および15を含み、それらは機械装置の速度情報および位置情報を供給する。位置情報は、とくに学習プログラムに関連して必要である。センサ14および15は、ロープ層が変化するとき、速度の変化を検出する。この構造は、270ないし360度の接触角を生み出す。図1を参照すると、ロープは、まず駆動ホイール3を周回し、次いで自由回転する綱車7を周回して、再び駆動ホイール3へ到達する。駆動ホイール3の有効接触角は270度であることが分かる。収納リール4を他の方式で配置することによって、たとえば360ないし540度の接触角を得ることができることが分かる。しかし、ここで重要なことは、接触角を小さく保つことである。リール4が引き抜き式のものでなければ、摩擦力を十分にするために必要な接触角は、従来技術において一般的であるように、約1000度となったであろう。今では、リール4を引き出す場合、駆動ホイール3に必要な摩擦力は、引き出し式リールがないよりも約半分小さい。このため、接触角は270ないし540度の範囲内にするのがよい。また、アンダカットのない半円形の溝を用いることができる。この場合、引き出し中のロープの摩耗が比較的少なくなる。これにより、ロープの作動寿命が改善される。また、駆動ホイールにおけるシャフトの力も適度になる。
【0012】
運転方式は、摩擦駆動ホイール3と収納リール4との間のロープ部分12における力が摩擦駆動ホイール3とフックとの間のロープ13の力と所定の関係にあるように作られている。この関係はたとえば半分であるが、また、他の関係を用いることもできる。これはロープ部分12の力を適切に調節することによって調整される。複数層に巻かれているリール4へと走るロープにおいて一定の力を発生させることが望ましい場合、リール4のロープ量と、さらには使用されているロープ層とに応じて、リール4のシャフトにさまざまなトルクが必要となる。これは、ロープ量が変化するにしたがって、リール4のシャフトとロープとの間の半径が変化するからである。半径は、リール4上に新規の層が作られ始めるとき、常に増大する。このため、トルク指令の変更が制御用コンピュータにおいて必要である。これを成功させるため、装置を制御するコンピュータは、リール4へ巻き付けられるロープの巻きがいつ変化するかを知る必要がある。この情報を得るために、学習プログラムがコンピュータで使用される。学習走行は機械装置2の一定速度で行われる。この場合、機械装置1は小さいトルク指令で駆動する。このため、クレーンは、コンピュータ11により制御されて、一定速度で吊り上げ移動の一端から他端へと駆動する。この場合、ロープが新規の層に巻き付けられ始めると、機械装置1の速度が常に変化する。コンピュータ11は機械装置のシャフトにおけるセンサ14および15によって位置および速度を監視する。その変化の検出点はコンピュータの記憶装置に保存される。これはテーブルにされ、それによって、収納リール4に必要なトルクの変更を、通常の運転において管理することができる。通常の駆動において、この層の情報を使用し、ロープ力を一定に保つように機械装置2のトルクを変更する。クレーンのフックに接続されたロープ部分13は、摩擦作動式駆動ホイールにより制御され、余分なロープは収納リール4に複数層で巻き付けられる。
【0013】
図2は、収納リールの構造を示す。ロープのさまざまな層は参照番号16、17、18および19で示す。
【0014】
図3は、速度指令トンネル20および21を示す。図3において、速度指令22は正数から負数までのさまざまな数値を受ける。曲線23は実現速度指令を示し、また、負の速度でのロープのスリップを示す。この場合、スリップを、速度指令トンネルの壁面に衝突する速度指令によって管理する。スリップは主として、負荷が小さい場合または無負荷駆動の場合に発生する。この場合、スリップを、収納リール4におけるトルクを大きくすることによって管理することができる。しかし、この場合、全トルクの必要性は小さく、収納リールにはトルク増大の余裕がある。
【0015】
図4において、ブロック28はユーザまたは他の制御から送られてくる速度指令を示し、速度指令は装置を通る信号36によって制御用コンピュータ11へと伝わる。さらに、コンピュータは、速度指令38を駆動ホイール3の電気駆動部9へ与える。駆動ホイール3の駆動部は、負荷により生じるトルクを監視し、それをさらに信号32によって加算部27へ送る。また、予張力情報26が信号33によって加算部27へ到着する。上記予張力情報は、無負荷状態の場合に駆動ホイール3と収納リール4との間のロープ12が緩まないようにするために必要である。ロープ12が緩んだ場合、収納リール4におけるロープの制御された巻き付けが妨げられる。吊り上げ装置に負荷がある場合、予張力情報はゼロでもよい。トルク指令は、予張力情報によって補正され、乗算部37へ送られる。第2の因子として、トルク除算係数35がこの乗算部へと到着する。コンピュータ11は、ロープ部分12および13におけるロープ力の比が所望のように保たれるように、この係数を演算する。最後のトルク指令31が乗算部37から収納リールの電気駆動部10へと送られる。収納リール4はその位置情報46を制御用コンピュータ11に与える。コンピュータは、上記位置情報を利用してロープ層の変化点に注意する。変化点が発生すると、コンピュータはトルク除算係数35を変更する。速度指令トンネルを作成するために、コンピュータ11は収納リール4に適した速度情報42を算出する。これは駆動ホイール3の速度39から得られ、それは乗算部41において速度係数40によって補正される。この係数40は収納リール4の状態およびその層によって左右される。許容速度誤差45が、加算部43において信号25による上記速度情報に付加される。これは速度指令トンネルの上縁30を生成する。同様の方式で、速度誤差が、差分部44において速度情報42から減算され、速度指令トンネルに対する下限29を生成する。ロープがスリップし、速度指令トンネルの縁に達した場合、収納リール4はそのトルクを増大して、ロープがさらにスリップしないようにする。
【0016】
上記の説明およびこれに関連した図面は、本発明の例証を意図したに過ぎないことがわかる。本発明を、添付の請求項に開示する本発明の保護の範囲および真意から逸脱しないで、さまざまに変更および改造できることは、当業者には明らかである。
【特許請求の範囲】
【請求項1】
クレーンのフックに接続されたロープ部分(13)の摩擦作動式駆動ホイール(3)による制御を含み、余分のロープ(12)を収納リール(4)に複数層に巻き付け、それは2つの機械装置(1、2)を使用することによってなされ、それらのうち第1のもの(1)を前記駆動ホイール(3)用とし、他方のもの(2)を前記収納リール(4)用としているクレーンの制御方法において、該方法は、前記機械装置(1、2)のうち一方を速度指令により、他方の機械装置(1、2)をトルク指令により制御することを特徴とするクレーンの制御方法。
【請求項2】
請求項1に記載の方法において、該方法は、前記駆動ホイール(3)を駆動する機械装置(1)を速度指令により、また前記収納リール(4)を駆動する機械装置(2)をトルク指令により制御することを特徴とする方法。
【請求項3】
請求項1に記載の方法において、該方法は、前記駆動ホイール(3)を駆動する機械装置(1)をトルク指令により、また前記収納リール(4)を駆動する機械装置(2)を速度指令により制御することを特徴とする方法。
【請求項4】
請求項1に記載の方法において、該方法は、両機械装置(1、2)を制御し、それらの相互依存を管理する共通のコンピュータにより前記クレーンを制御することを特徴とする方法。
【請求項5】
請求項1に記載の方法において、該方法は、前記機械装置(1、2)のうち一方もしくは両方のモータ駆動部(9、10)を同時に制御する共通のコンピュータにより前記クレーンを制御することを特徴とする方法。
【請求項6】
請求項1に記載の方法において、該方法は、吊り上げ高さに応じたテーブルを制御用コンピュータ(11)の記憶装置に保存し、ロープ力を一定に保つように前記テーブルによって前記収納リール(4)のトルクを調節することを特徴とする方法。
【請求項7】
請求項4に記載の方法において、該方法は、吊り上げ高さに応じてロープの層を管理するテーブルを、前記コンピュータ(11)に保存した学習プログラムによって自動的に構成することを特徴とする方法。
【請求項8】
請求項1に記載の方法において、該方法は、前記駆動ホイール(3)のロープのスリップを、速度が速度トンネル内で保たれていない場合、前記収納リールのトルクを増大することによって管理することを特徴とする方法。
【請求項9】
請求項1に記載の方法において、該方法は、綱車(8)と前記駆動ホイール(3)とによって、ロープに対して270ないし540度の接触角を配設することを特徴とする方法。
【請求項1】
クレーンのフックに接続されたロープ部分(13)の摩擦作動式駆動ホイール(3)による制御を含み、余分のロープ(12)を収納リール(4)に複数層に巻き付け、それは2つの機械装置(1、2)を使用することによってなされ、それらのうち第1のもの(1)を前記駆動ホイール(3)用とし、他方のもの(2)を前記収納リール(4)用としているクレーンの制御方法において、該方法は、前記機械装置(1、2)のうち一方を速度指令により、他方の機械装置(1、2)をトルク指令により制御することを特徴とするクレーンの制御方法。
【請求項2】
請求項1に記載の方法において、該方法は、前記駆動ホイール(3)を駆動する機械装置(1)を速度指令により、また前記収納リール(4)を駆動する機械装置(2)をトルク指令により制御することを特徴とする方法。
【請求項3】
請求項1に記載の方法において、該方法は、前記駆動ホイール(3)を駆動する機械装置(1)をトルク指令により、また前記収納リール(4)を駆動する機械装置(2)を速度指令により制御することを特徴とする方法。
【請求項4】
請求項1に記載の方法において、該方法は、両機械装置(1、2)を制御し、それらの相互依存を管理する共通のコンピュータにより前記クレーンを制御することを特徴とする方法。
【請求項5】
請求項1に記載の方法において、該方法は、前記機械装置(1、2)のうち一方もしくは両方のモータ駆動部(9、10)を同時に制御する共通のコンピュータにより前記クレーンを制御することを特徴とする方法。
【請求項6】
請求項1に記載の方法において、該方法は、吊り上げ高さに応じたテーブルを制御用コンピュータ(11)の記憶装置に保存し、ロープ力を一定に保つように前記テーブルによって前記収納リール(4)のトルクを調節することを特徴とする方法。
【請求項7】
請求項4に記載の方法において、該方法は、吊り上げ高さに応じてロープの層を管理するテーブルを、前記コンピュータ(11)に保存した学習プログラムによって自動的に構成することを特徴とする方法。
【請求項8】
請求項1に記載の方法において、該方法は、前記駆動ホイール(3)のロープのスリップを、速度が速度トンネル内で保たれていない場合、前記収納リールのトルクを増大することによって管理することを特徴とする方法。
【請求項9】
請求項1に記載の方法において、該方法は、綱車(8)と前記駆動ホイール(3)とによって、ロープに対して270ないし540度の接触角を配設することを特徴とする方法。
【図1】



【図2A】
【図2B】
【図3】

【図4】

【図2A】
【図2B】
【図3】
【図4】
【公表番号】特表2010−536688(P2010−536688A)
【公表日】平成22年12月2日(2010.12.2)
【国際特許分類】
【出願番号】特願2010−522410(P2010−522410)
【出願日】平成20年8月21日(2008.8.21)
【国際出願番号】PCT/FI2008/050471
【国際公開番号】WO2009/027580
【国際公開日】平成21年3月5日(2009.3.5)
【出願人】(510051679)コネクレーンズ ピーエルシー (7)
【氏名又は名称原語表記】KONECRANES PLC
【公表日】平成22年12月2日(2010.12.2)
【国際特許分類】
【出願日】平成20年8月21日(2008.8.21)
【国際出願番号】PCT/FI2008/050471
【国際公開番号】WO2009/027580
【国際公開日】平成21年3月5日(2009.3.5)
【出願人】(510051679)コネクレーンズ ピーエルシー (7)
【氏名又は名称原語表記】KONECRANES PLC
[ Back to top ]